Le déroulement d'une méthode numérique à un pas est le suivant :
Pour chaque sous-intervalle \([t_n,t_{n+1}]\), on a l'égalité
\[ y_{n+1} = y_n + \int_{t_n}^{t_{n+1}}{f(t,y(t))dt}\,. \]La méthode numérique choisie permet d'obtenir une approximation de l'intégrale donnant \(y_{n+1}\equiv y(t_{n+1})\) à partir de \(y_n\equiv y(t_n))\). Nous allons envisager six manières de calculer numériquement cette intégrale.
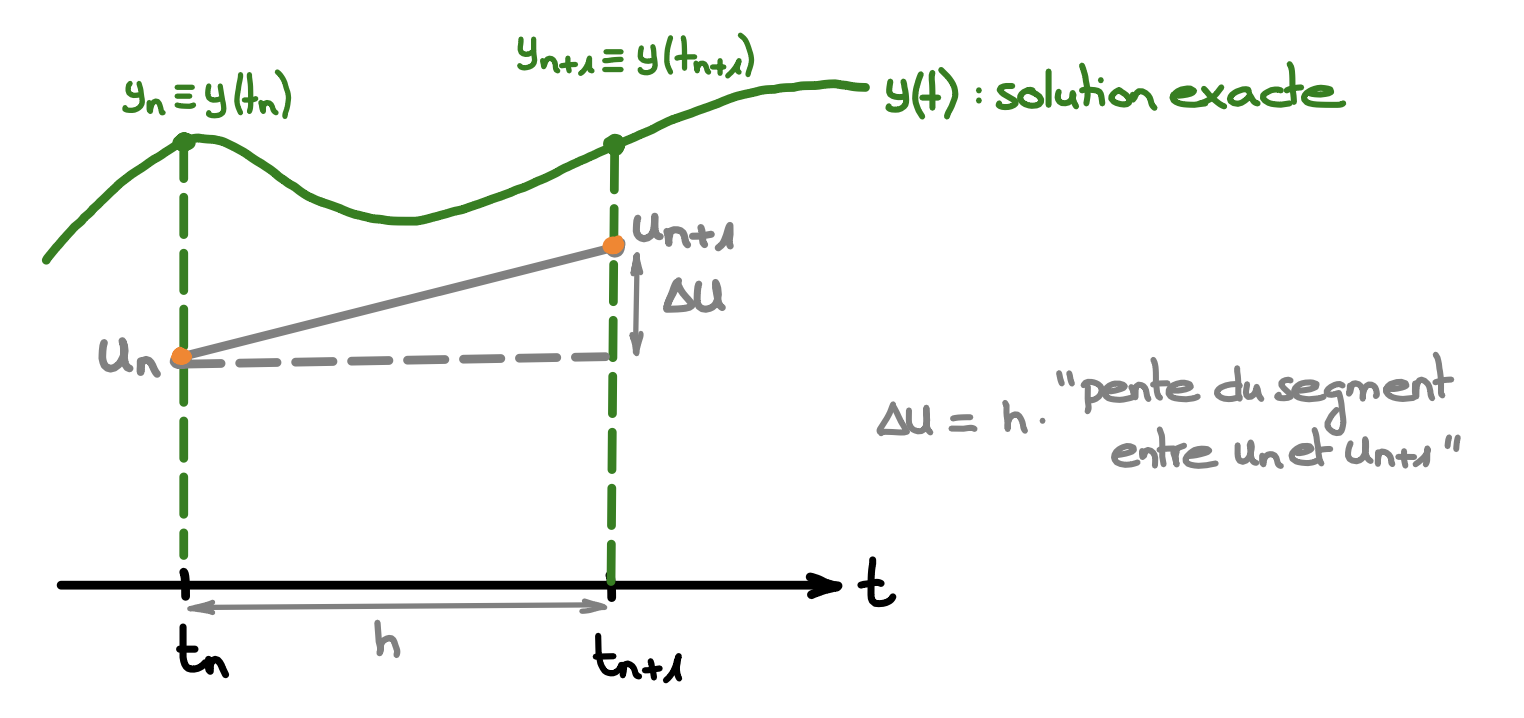
Chacune de ces méthodes permet d'obtenir, pour chaque instant \(t_{n+1}\) avec \(n=0,\ldots,N-1\), c'est-à-dire pour chaque noeud de la partition de pas \(h\) choisie, une approximation numérique \(u_{n+1}\) de \(y_{n+1}\) :
\[u_0\equiv y_0 \longrightarrow u_1 \longrightarrow u_2\longrightarrow\ldots \longrightarrow u_n \longrightarrow u_{n+1}\]On obtient l'approximation \(u_{n+1}\) en \(t_{n+1}\) en partant de l'approximation \(u_n\) en \(t_n\) :
\[ u_{n+1} = u_n + \Delta u\,, \]où \(\Delta u\) n'est autre que la ''pente'' choisie multipliée par le pas \(h\).
Dans la méthode d'Euler progressive, on choisit d'approcher numériquement l'intégrale définie \[ \int_{t_n}^{t_{n+1}}{f(t,y(t))dt} \] à l'aide de la formule de quadrature non composite du point de gauche :
\[ J_n^{\text{PG}}(f) = \underbrace{(t_{n+1}-t_n)}_{=h}f(t_n,y(t_n))\,. \]En remplaçant \(y(t_n)\), dont la valeur est inconnue, par l'approximation \(u_n\), on obtient alors le schéma numérique suivant :
\[ \left\{\begin{array}{rcl} u_{n+1} &=& u_n + hf_n\,,\\ u_0&=&y_0\,.\end{array}\right. \]où \(f_n=f(t_n,u_n)\).
Dans cette méthode, la ''pente'' \(\Delta u/h\) choisie est
\[ f_n\equiv f(t_n,u_n) \]et
\[ u_{n+1} = u_n + \Delta u = u_n+hf_n = u_n+h f(t_n,u_n)\,. \]Dans la méthode d'Euler rétrograde, on approche numériquement l'intégrale définie
\[ \int_{t_n}^{t_{n+1}}{f(t,y(t))dt} \]à l'aide de la formule de quadrature non composite du point de droite :
\[ J_n^{\text{PD}}(f) = \underbrace{(t_{n+1}-t_n)}_{=h}f(t_{n+1},y(t_{n+1}))\,. \]On obtient alors le schéma numérique suivant :
\[ \left\{\begin{array}{rcl} u_{n+1} &=& u_n + hf_{n+1}\,,\\ u_0&=&y_0\,.\end{array}\right. \]Cette méthode est implicite car \(f_{n+1}=f(t_{n+1},u_{n+1})\). Ainsi, on est finalement amené à rechercher le point fixe de l'équation
\[ u_{n+1} = u_n + hf_{n+1} = g(u_{n+1}) \,. \]Dans cette méthode, la ''pente'' \(\Delta u/h\) choisie est
\[ f_{n+1}\equiv f(t_{n+1},u_{n+1}) \]et
\[ u_{n+1} = u_n + \Delta u = u_n+hf_{n+1} = u_n+h f(t_{n+1},u_{n+1})\,. \]Ici, pour obtenir l'approximation \(u_{n+1}\), on est donc naturellement amené à résoudre une équation par la méthode de point fixe :
\[ u_{n+1} = u_n + hf_{n+1} = g(u_{n+1}) \,. \]
C'est ce que l'on fait par exemple à l'exercice 2 de la série 23. Il
est également possible de résoudre cette équation par
une autre méthode de recherche de zéros
(voir par exemple l'exercice 3 de la série 23 dans lequel on utilise
la fonction newton de SciPy).
Dans la méthode de Crank-Nicolson, on approche numériquement l'intégrale définie à l'aide de la formule de quadrature non composite du trapèze :
\[ J_n^{\text{TR}}(f) = \underbrace{(t_{n+1}-t_n)}_{=h}\dfrac{f(t_{n},y(t_{n})) +f(t_{n+1},y(t_{n+1}))}{2}\,. \]On obtient alors le schéma numérique implicite suivant :
\[ \left\{\begin{array}{rcl} u_{n+1} &=& u_n + \dfrac{h}{2}(f_n+f_{n+1})\,,\\ u_0&=&y_0\,.\end{array}\right. \]La nature implicite de cette méthode rend cette dernière difficile à mettre en place. Souvent, on utilise plutôt un schéma légèrement modifié grâce à une approche de type ''prédicteur-correcteur'' : on commence par faire une prédiction, c'est-à-dire un premier calcul, par exemple à l'aide du schéma d'Euler (progressif), pour obtenir une approximation
\[ u_{n+1}^*=u_n+hf_n\,. \]La valeur inconnue \(f_{n+1}\) est alors remplacée par
\[ f_{n+1}^*=f(t_{n+1},u_{n+1}^*)\,. \] En procédant ainsi, on obtient la méthode de Heun décrite ci-dessous.Directement inspirée de la méthode de Crank-Nicolson, la méthode de Heun est une méthode explicite correspondant au schéma suivant :
\[ \left\{\begin{array}{rcl} u_{n+1} &=& u_n + \dfrac{h}{2}(f_n+f_{n+1}^*)\,,\\ u_0&=&y_0\,.\end{array}\right. \]Il s'agit d'une méthode (de Runge-Kutta) explicite en deux étapes :
\[ \begin{array}{rcl} K_1 &=& f(t_n,u_n)\,,\\ K_2 &=&f(t_{n+1},u_n+hK_1)\,,\end{array} \]où \(K_1\) et \(K_2\) sont les deux pentes importantes dans la méthode.
Ainsi, le schéma peut être réécrit de la façon suivante :
\[ \left\{\begin{array}{rcl} u_{n+1} &=& u_n + \dfrac{h}{2}(K_1+K_{2})\,,\\ u_0&=&y_0\,.\end{array}\right. \]On peut également envisager approcher numériquement l'intégrale du problème de Cauchy à l'aide de la formule de quadrature non composite du point milieu :
\[ J_n^{\text{PM}}(f) = hf(t_{n}+\frac{h}{2},y(t_{n}+\frac{h}{2}))\,. \]Comme on ne connaît pas \(u_{n+1/2}\), on exploite souvent la méthode d'Euler (progressive) pour écrire :
\[ u_{n+1/2} = u_n + \frac{h}{2}f_n\,. \]On obtient alors un schéma appelé méthode d'Euler modifiée (améliorée) :
\[ \left\{\begin{array}{rcl} u_{n+1} &=& u_n + hf_{n+1/2}\,,\\ u_0&=&y_0\,,\end{array}\right. \]où \(f_{n+1/2} = f(t_n+\frac{h}{2}, u_{n+1/2})\). On appelle également cette méthode la méthode de Runge-Kutta ''classique'' à deux étapes :
\[ \begin{array}{rcl} K_1 &=& f(t_n,u_n)\,,\\ K_2 &=&f(t_{n}+\frac{h}{2},u_n+\dfrac{h}{2}K_1)\,.\end{array} \] Ainsi, le schéma peut être réécrit de la façon suivante : \[ \left\{\begin{array}{rcl} u_{n+1} &=& u_n + hK_2\,,\\ u_0&=&y_0\,.\end{array}\right. \]Notre étude de l'intégration numérique suggère que l'on peut également envisager utiliser la formule de quadrature non composite de Simpson :
\[ J_n^{\text{S}}(f) = \frac{h}{6} \left[ f(t_{n},y(t_{n})) + 4 f(t_{n}+\frac{h}{2},y(t_{n}+\frac{h}{2})) + f(t_{n+1},y(t_{n+1})) \right]\,. \]La méthode de Runge-Kutta classique (à 4 étapes) RK4 consiste à prendre (il s'agit d'un choix) :
\[\begin{aligned} K_1 &=f(t_n,u_n) \,\,\leftarrow\text{ (point de gauche)}\\ K_2 &=f(t_{n}+\frac{h}{2},u_n+\frac{h}{2}K_1) \,\,\leftarrow\text{ (prédiction à l'aide d'Euler progressive)}\\ K_3 &=f(t_{n}+\frac{h}{2},u_n+\frac{h}{2}K_2) \,\,\leftarrow\text{ (prédiction à l'aide de } K_2)\\ K_4 &=f(t_{n+1},u_n+hK_3) \,\,\leftarrow\text{ (prédiction à l'aide de } K_3) \end{aligned}\]Ainsi, le schéma RK4 peut être écrit de la façon suivante :
\[ \left\{\begin{array}{rcl} u_{n+1} &=& u_n + \dfrac{h}{6}(K_1+2K_2+2K_3+K_4)\,,\\ u_0&=&y_0\,.\end{array}\right. \]Dernière compilation: 2025-05-28 (06:27:05)
Sauf indication contraire, le contenu de ce document est soumis à une licence Creative Commons internationale, Attribution: Pas d'Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 (CC BY-NC-SA 4.0)
