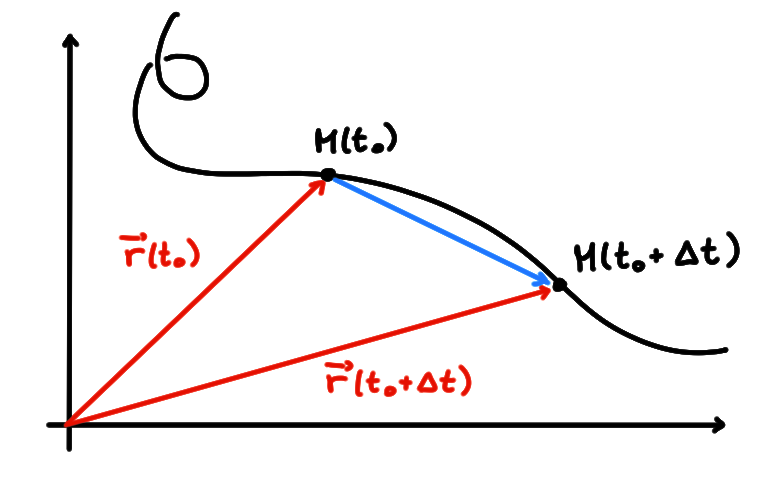
L'utilisation du rayon-vecteur permet de comparer les positions en deux instants \(t_0\lt t_0+\Delta t\), à l'aide du déplacement \(\vec{r}(t_0+\Delta t )-\vec{r}(t_0)\):
On s'attend à ce que si les instants \(t_0\) et \(t_0+\Delta t \) sont très rapprochés, le
déplacement devienne aussi petit.
Si on divise ce vecteur par la durée de l'intervalle \([t_0,t_0+\Delta t ]\), le quotient
\[
\frac{\vec{r}(t_0+\Delta t )-\vec{r}(t_0)}{\Delta t }
\]
doit être interprété comme une vitesse sur cet intervalle.
Dans la limite où \(\Delta t \to 0\),
on fait ainsi apparaître les dérivées des fonctions \(x(t)\) et \(y(t)\) par
rapport au temps:
\[
\lim_{\Delta t \to 0}\frac{\vec{r}(t_0+\Delta t )-\vec{r}(t_0)}{\Delta t }=
\begin{pmatrix}
\displaystyle\lim_{\Delta t \to 0}\frac{x(t_0+\Delta t )-x(t_0)}{\Delta t }\\
\\
\displaystyle\lim_{\Delta t \to 0}\frac{y(t_0+\Delta t )-y(t_0)}{\Delta t }\\
\end{pmatrix}=
\begin{pmatrix}
\dot{x}(t_0)\\
\dot{y}(t_0)
\end{pmatrix}\,
\]
Remarque: Dans ce chapitre, on utilise le ''point'' \(\dot{x}\) au lieu du ''prime'' \(x'\). C'est une convention souvent adoptée dans les ouvrages traitant de cinématique, où le ''point'' indique une dérivée par rapport au temps.
S'il ne s'annule pas, le vecteur tangent donne en particulier la direction de la tangente à la courbe en au point \(M(t_0)\):
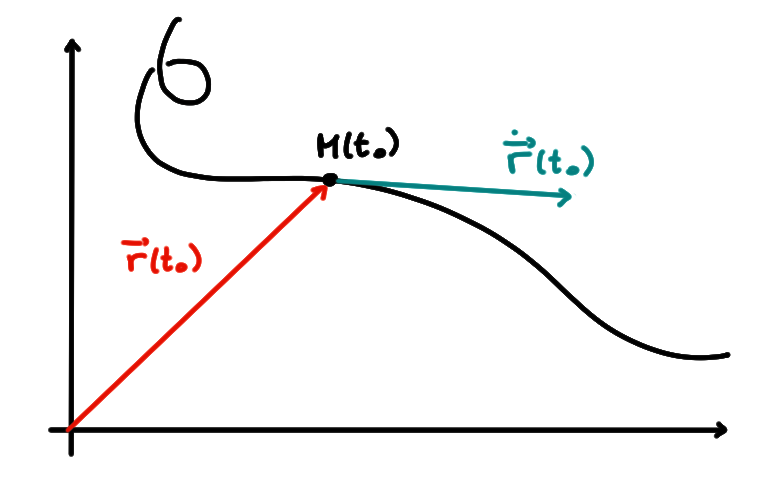
Mais il donne plus d'informations que ça, puisqu'il doit être interprété comme
le vecteur de vitesse instantanée de la particule à l'instant \(t_0\); il
donne aussi le sens du déplacement.
L'étude des signes de \(\dot{x}(t)\) et \(\dot{y}(t)\) renseigne donc sur la
direction et le sens de déplacement de la particule à l'instant \(t\):
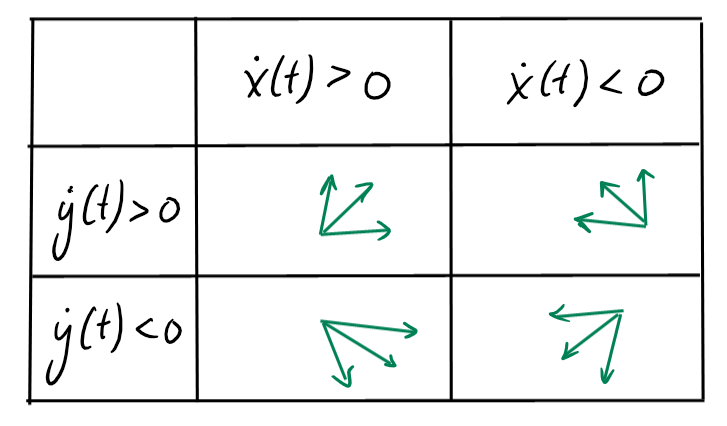
En particulier,
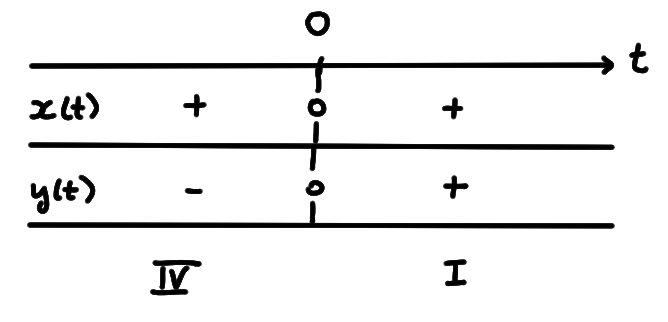
Exemple: Considérons la courbe \[\begin{aligned} M:\mathbb{R}&\longrightarrow \mathbb{R}^2\\ t &\longmapsto M(t) =\left( t^2, t \right)\,. \end{aligned}\] L'étude des signes de \(x(t)=t^2\) et \(y(t)=t\) nous dit déjà à quel quadrant appartient \(M(t)\), en fonction du temps \(t\):
Exemple: Si on reprend la courbe paramétrée décrivant un cercle, on a \[\vec{r}(t)= \begin{pmatrix} \cos(t)\\ \sin(t) \end{pmatrix}\,, \qquad \dot{\vec{r}}(t)= \begin{pmatrix} -\sin(t)\\ \cos(t) \end{pmatrix}\,. \]
Considérons un cas où le vecteur tangent peut s'annuler.
Exemple:
Pour \(t\in \mathbb{R}\), considérons la courbe décrite par
\[
\vec{r}(t)=
\begin{pmatrix}
t^3\\
t^6/2
\end{pmatrix}\,,
\qquad
\dot{\vec{r}}(t)=
\begin{pmatrix}
3t^2\\
3t^5
\end{pmatrix}\,.
\]
Puisque
\[
\dot{\vec{r}}(0)=
\begin{pmatrix} 0\\ 0 \end{pmatrix}\,,
\]
le vecteur tangent à l'instant \(t=0\) ne donne
aucune information sur l'allure de
la courbe au voisinage de ce point (tangence, sens de déplacement, etc.).
Comment faire, donc, pour étudier la courbe au voisinage de \(M(0)=(0,0)\)?
Ce qu'il faut remarquer c'est que \(t=0\) est l'unique instant où
\(\dot{\vec{r}}(t)\) s'annule. Or tant qu'il n'est pas nul, même très petit, il
contient quand même de l'information.
On peut par exemple considérer
la pente du vecteur tangent en un temps \(t\neq 0\), donnée par
\[
\frac{\dot{y}(t)}{\dot{x}(t)}=
\frac{3t^5}{3t^2}=t^3\,.
\]
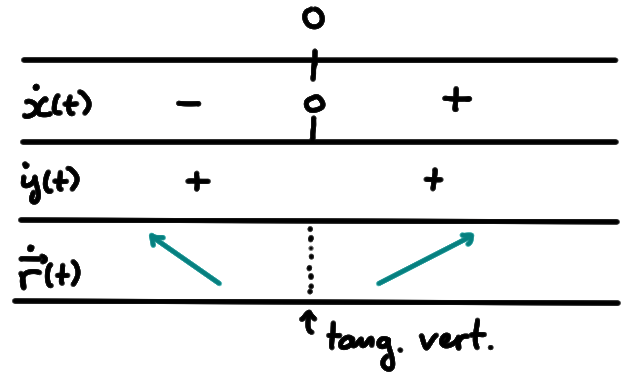
Au voisinage de \(t=0\), le vecteur tangent a donc une pente qui
est négative si \(t\lt 0\), positive si \(t\gt 0\), et
dans la limite \(t\to 0\) tend vers
\[
\lim_{t\to 0}
\frac{\dot{y}(t)}{\dot{x}(t)}=
\lim_{t\to 0}t^3=0\,.
\]
Ceci signifie que la courbe doit possèder en \(t=0\) une tangente horizontale.
Pour étudier \(\Gamma\) au voisinage d'un point stationnaire, on pourra procéder comme dans l'exemple précédent:
Exemple:
Considérons, pour \(t\in\mathbb{R}\), la courbe
\[
\vec{r}(t)=
\begin{pmatrix}
t^2\\
t^3
\end{pmatrix}\,,
\qquad
\dot{\vec{r}}(t)=
\begin{pmatrix}
2t\\
3t^2
\end{pmatrix}\,.
\]
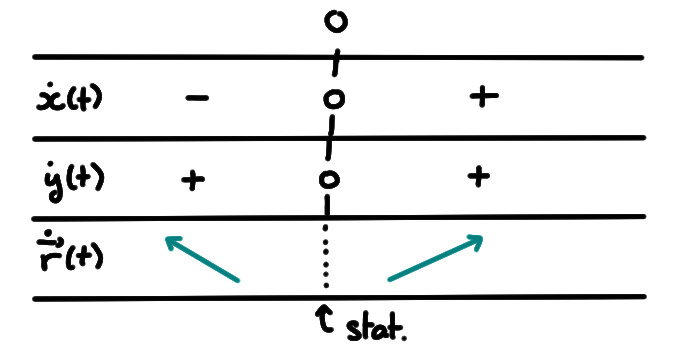
Puisque \(\dot{\vec{r}}(0)=
\begin{pmatrix}
0\\
0
\end{pmatrix}\), \(M(0)=(0,0)\) est un point stationnaire. Etudions l'allure de
la courbe au voisinage de ce point.
Les signes de \(x(t)\) et \(y(t)\) renseignent sur le quadrant:
Dernière compilation: 2024-06-03 (22:36:08)
Sauf indication contraire, le contenu de ce document est soumis à une licence Creative Commons internationale, Attribution: Pas d'Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 (CC BY-NC-SA 4.0)
