En algèbre linéaire, une façon standard et non-triviale d'obtenir de nouveaux vecteurs à partir d'une famille donnée est de former des combinaisons linéaires.
Exemple: Dans \(\mathbb{R}^2\), considérons \(\boldsymbol{v}_1= \begin{pmatrix} 3\\5 \end{pmatrix}\), \(\boldsymbol{v}_2= \begin{pmatrix} -1\\2 \end{pmatrix}\). En prenant \(\lambda_1=-2\), \(\lambda_2=3\), \[ \lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2= -2\binom{3}{5}+3\binom{-1}{2}= \binom{-9}{-4}\,. \] Choisissons maintenant un troisième vecteur: \(\boldsymbol{w}= \begin{pmatrix} 5\\-2 \end{pmatrix} \), et posons la question: est-il possible d'écrire \(\boldsymbol{w}\) comme une combinaison linéaire de \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\)? Il s'agit donc de voir s'il existe des scalaires \(\lambda_1,\lambda_2\) tels que \[ \lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2=\boldsymbol{w}\,. \] Lorsqu'on exprime cette relation en composantes, \[ \binom{3\lambda_1-\lambda_2}{5\lambda_1+2\lambda_2} = \binom{5}{-2}\,. \] Puisque deux vecteurs sont égaux si et seulement si leurs composantes sont égales deux-à-deux, on en déduit que \(\lambda_1\) et \(\lambda_2\) doivent être solution du système \[ \left\{ \begin{array}{ccccc} 3\lambda_1 &-& \lambda_2 &=&5\,, \\ 5\lambda_1 &+& 2\lambda_2 &=&-2\,. \end{array} \right. \] La solution de ce système est unique, donnée par \(\lambda_1=\frac{8}{11}\), \(\lambda_2=\frac{-31}{11}\). On en déduit que \(\boldsymbol{w}\) est bien combinaison linéaire de \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\): \[ \boldsymbol{w}=\tfrac{8}{11}\boldsymbol{v}_1-\tfrac{31}{11}\boldsymbol{v}_2\,. \]
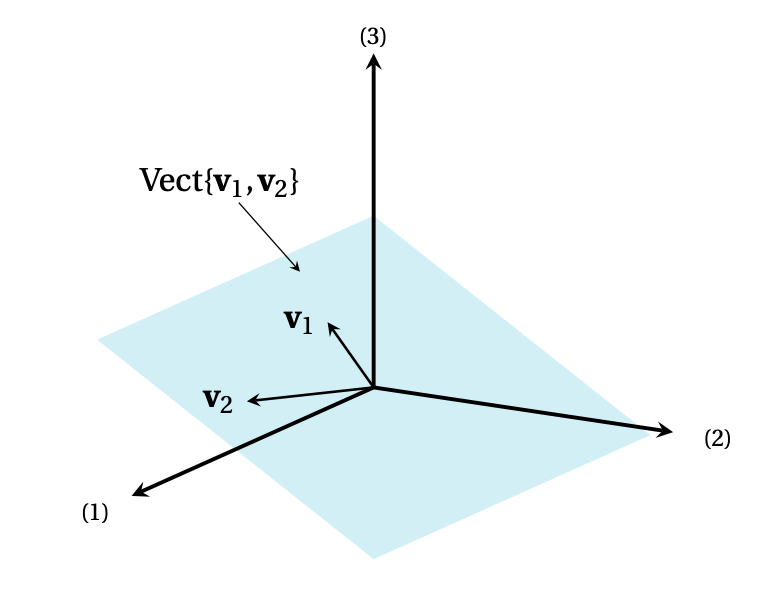
Plus généralement, fixons deux vecteurs \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\) dans le plan, et considérons toutes les combinaisons linéaires de la forme \[ \boldsymbol{w}=\lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2\,,\qquad \lambda_1,\lambda_2\in \mathbb{R}\,. \]
On remarque que
Exemple: Dans \(\mathbb{R}^3\), considérons \[ \boldsymbol{v}_1= \begin{pmatrix} -3\\ 2\\ 0 \end{pmatrix} \,,\quad \boldsymbol{v}_2= \begin{pmatrix} 1\\ 1\\ -1 \end{pmatrix} \,,\quad \boldsymbol{w}= \begin{pmatrix} 4\\ 0\\ 3 \end{pmatrix}\,. \] Est-ce que \(\boldsymbol{w}\) est combinaison linéaire de \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\)? Pour le savoir, cherchons \(\lambda_1,\lambda_2\) tels que \[ \lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2=\boldsymbol{w}\,, \] qui mène au système \[ \left\{ \begin{array}{ccccc} -3\lambda_1 &+& \lambda_2 &=&4\,, \\ 2\lambda_1 &+& \lambda_2 &=&0\,, \\ &-& \lambda_2 &=&3\,. \end{array} \right. \] Ce système est incompatible, donc \(\boldsymbol{w}\) ne peut pas s'écrire comme combinaison linéaire de \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\).
Remarque: En anglais, \(\mathrm{Vect}\{\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\}\) se note \(\mathrm{Span}\,\{\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\}\).
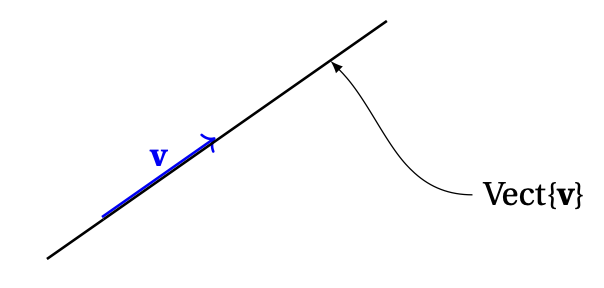
Pour les familles contenant un ou deux vecteurs:
Même si cette terminologie (''droite'', ''plan'') est empruntée à la géométrie du plan \((n=2)\) et de l'espace (\(n=3\)), nous l'utiliserons aussi dans les dimensions supérieures (\(n\gt 3\)).
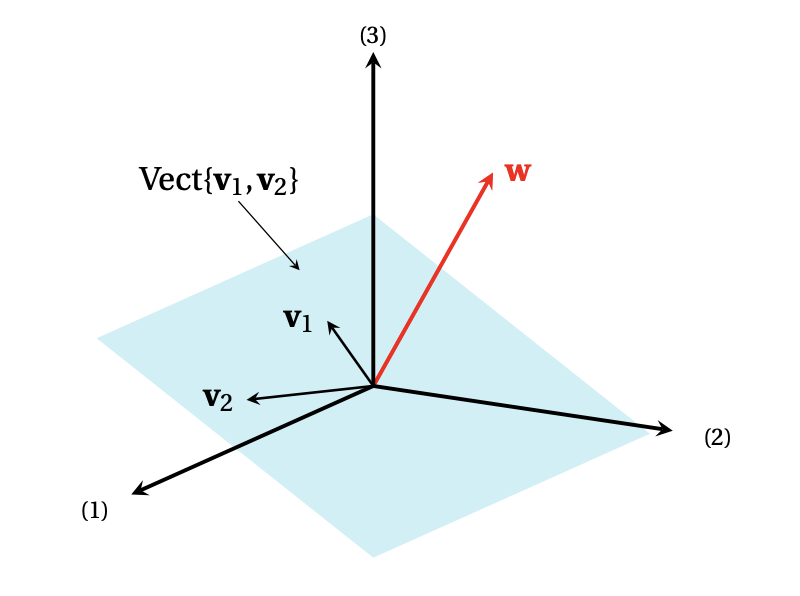
Exemple: Plus haut, nous avions défini \[ \boldsymbol{v}_1= \begin{pmatrix} -3\\ 2\\ 0 \end{pmatrix} \,,\quad \boldsymbol{v}_2= \begin{pmatrix} 1\\ 1\\ -1 \end{pmatrix} \,,\quad \boldsymbol{w}= \begin{pmatrix} 4\\ 0\\ 3 \end{pmatrix}\,, \] et montré que \(\boldsymbol{w}\) n'est pas combinaison linéaire de \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\). Nous pouvons maintenant interpréter ceci en disant que \(\boldsymbol{w}\) n'est pas dans le plan engendré par \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\):
Définissons, pour tout \(k=1,\dots,n\), le vecteur \(\boldsymbol{e}_k\in\mathbb{R}^n\) comme étant le vecteur dont toutes les composantes sont nulles, sauf la \(k\)-ème, qui vaut \(1\). \[ \boldsymbol{e}_1= \begin{pmatrix} 1\\ 0\\ 0\\ \vdots\\ 0\\ 0 \end{pmatrix}\,,\quad \boldsymbol{e}_2= \begin{pmatrix} 0\\ 1\\ 0\\ \vdots\\ 0\\ 0 \end{pmatrix}\,,\quad \cdots\,, \boldsymbol{e}_n= \begin{pmatrix} 0\\ 0\\ 0\\ \vdots\\ 0\\ 1 \end{pmatrix}\,. \] Cette famille de vecteur peut être utilisée pour décomposer n'importe quel vecteur, comme suit: \[\begin{aligned} \boldsymbol{x}= \begin{pmatrix} x_1\\ x_2\\ \vdots\\ x_n \end{pmatrix} &= \begin{pmatrix} x_1\\ 0\\ \vdots\\ 0 \end{pmatrix} + \begin{pmatrix} 0\\ x_2\\ \vdots\\ 0 \end{pmatrix} +\cdots + \begin{pmatrix} 0\\ 0\\ \vdots\\ x_n \end{pmatrix}\\ &= x_1\begin{pmatrix} 1\\ 0\\ \vdots\\ 0 \end{pmatrix} + x_2\begin{pmatrix} 0\\ 1\\ \vdots\\ 0 \end{pmatrix} +\cdots + x_n\begin{pmatrix} 0\\ 0\\ \vdots\\ 1 \end{pmatrix}\\ &= x_1\boldsymbol{e}_1+x_2\boldsymbol{e}_2+\cdots+x_n\boldsymbol{e}_n\,. \end{aligned}\] En d'autres termes, \[ \mathbb{R}^n=\mathrm{Vect}\{\boldsymbol{e}_1,\dots,\boldsymbol{e}_n\}\,. \] Plus tard, on appellera \(\{\boldsymbol{e}_1,\dots,\boldsymbol{e}_n\}\) la base canonique de \(\mathbb{R}^n\).
Dernière compilation: 2025-09-02 (09:33:29)
Sauf indication contraire, le contenu de ce document est soumis à une licence Creative Commons internationale, Attribution: Pas d'Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 (CC BY-NC-SA 4.0)
