Un de nos objectifs dans ce qui suit sera de trouver des
conditions suffisantes pour déterminer si un système est compatible ou
incompatible.
Mais avant cela, nous allons énoncer une propriété générale, satisfaite par
n'importe quel système linéaire, concernant le nombre
de solutions qu'il peut posséder.
Théorème: Si un système est compatible, alors soit il possède exactement une solution, soit il en possède une infinité.
Considérons un système de taille \(m\times n\) de la forme \((*)\), que l'on suppose être compatible. Si sa solution n'est pas unique, c'est qu'il existe au moins deux familles distinctes, que l'on notera \((\bar{x}_1,\dots,\bar{x}_n)\) et \((\bar{y}_1,\dots,\bar{y}_n)\), qui sont toutes deux solutions de \((*)\); cela signifie qu'elles satisfont toutes les contraintes: pour tout \(k=1,2,\dots,m\), on a d'une part que \[ \begin{array}{ccccccc} a_{k,1}\bar{x}_1 &+& \cdots &+& a_{k,n}\bar{x_n} &=&b_k \end{array} \] et d'autre part que \[ \begin{array}{ccccccc} a_{k,1}\bar{y}_1 &+& \cdots &+& a_{k,n}\bar{y_n} &=&b_k\,. \end{array} \] Prenons alors un réel \(\lambda\) quelconque, différent de \(0\) et de \(1\), et définissons la famille \((\bar{z}_1,\dots,\bar{z}_n)\), où \[ z_j:= \lambda \bar{x}_j+(1-\lambda)\bar{y}_j\,,\quad j=1,2,\dots,n\,. \] Montrons alors que \((\bar{z}_1,\dots,\bar{z}_n)\) est aussi solution, en montrant qu'elle satisfait chacune des \(m\) contraintes du système. En effet, \[\begin{aligned} a_{k,1}\bar{z}_1&+\cdots+a_{k,n}\bar{z_n}\\ =&a_{k,1}(\lambda \bar{x}_1+(1-\lambda)\bar{y}_1) +\cdots +a_{k,n}(\lambda \bar{x}_n+(1-\lambda)\bar{y}_n)\\ =&\lambda \bigl(\underbrace{a_{k,1}\bar{x}_1+\cdots+a_{k,n}\bar{x_n}}_{=b_k}\bigr) +(1-\lambda)\bigl(\underbrace{a_{k,1}\bar{y}_1+\cdots+a_{k,n}\bar{y_n}}_{=b_k}\bigr)\\ =&\lambda b_k+(1-\lambda)b_k\\ =& b_k\,, \end{aligned}\] ce qui signifie que la \(k\)-ème contrainte est satisfaite. Puisque \((\bar{x}_1,\dots,\bar{x}_n)\) et \((\bar{y}_1,\dots,\bar{y}_n)\) sont distinctes, il existe au moins un \(k\) tel que \(\bar{x}_k\neq \bar{y}_k\). Cela signifie que si \(\lambda\) n'est égal ni à \(0\) ni à \(1\), le nombre \(z_k=\lambda\bar{x}_k+(1-\lambda)\bar{y}_k\) est différent à la fois de \(\bar{x}_k\) et de \(\bar{y}_k\). On peut donc, en choisissant \(\lambda\), construire autant de nouvelles solutions. Ceci signifie que le système possède une infinité de solutions.
Remarque: Un peu plus loin dans le cours, nous redonnerons la preuve de ce théorème, mais en utilisant le langage vectoriel, ce qui la rendra plus transparente.
Pour des petites valeurs de \(n\), l'affirmation du Théorème ''\(0,1,\infty\)'' peut s'interpréter géométriquement.
Fixons \(n=2\),
et considérons un système de taille \(m\times 2\):
\[
(*)
\left\{
\begin{array}{ccccc}
a_{1,1}x_1 &+& a_{1,2}x_2 &=&b_1\,, \\
a_{2,1}x_1 &+& a_{2,2}x_2 &=&b_2\,, \\
&& &\vdots& \\
a_{m,1}x_1 &+& a_{m,2}x_2 &=&b_m\,.
\end{array}
\right.
\]
Ici, une paire \((x_1,x_2)\) peut s'interpréter comme les coordonnées d'un point
dans le plan, relativement à un repère orthonormé fixé.
Aussi, on sait (voir cours de géométrie analytique) qu'une contrainte de la
forme
\[
\begin{array}{ccccc}
a_{k,1}x_1 &+& a_{k,2}x_2 &=&b_k
\end{array}
\]
signifie que le point de coordonnées \((x_1,x_2)\) est sur une droite.
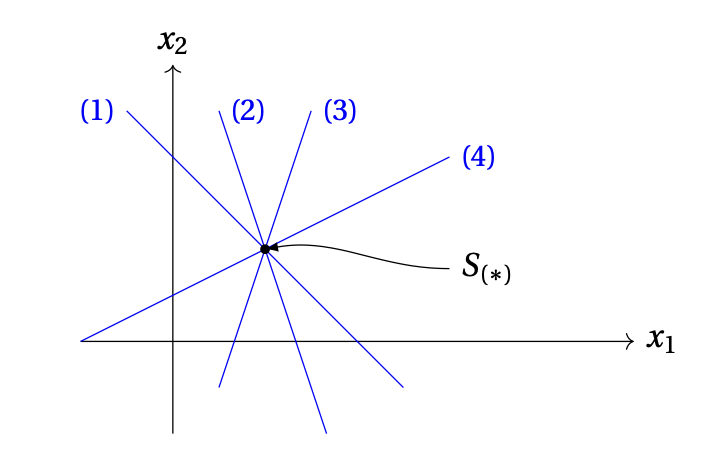
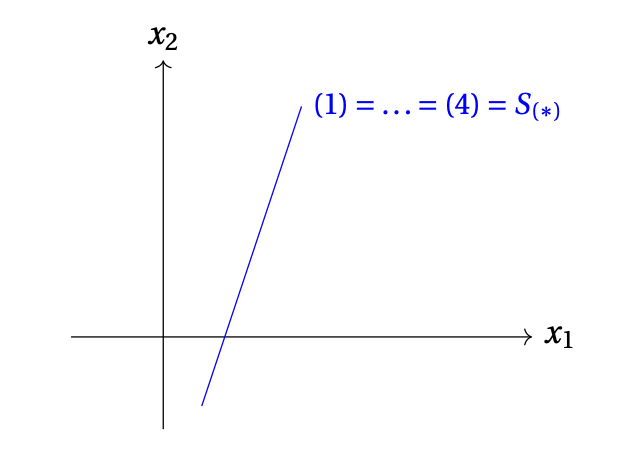
Donc une paire \((x_1,x_2)\) sera solution de \((*)\), \((x_1,x_2)\in S_{(*)}\),
si et seulement si le point
\((x_1,x_2)\) appartient en même temps à chacune des \(m\) droites spécifiées
dans \((*)\).
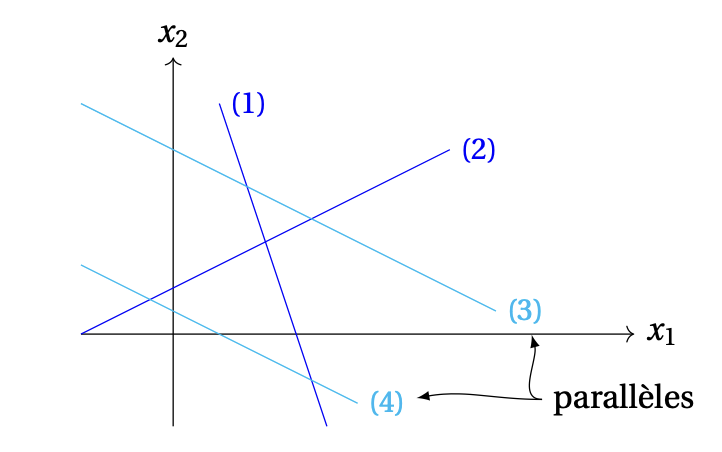
Or appartenir à \(m\) droites en même temps est une contrainte en général
difficile à satisfaire, surtout si \(m\) est grand.
On comprend que géométriquement, il est impossible de créer \(m\) droites dans le plan qui s'intersectent, par exemple, en exactement 4 points.
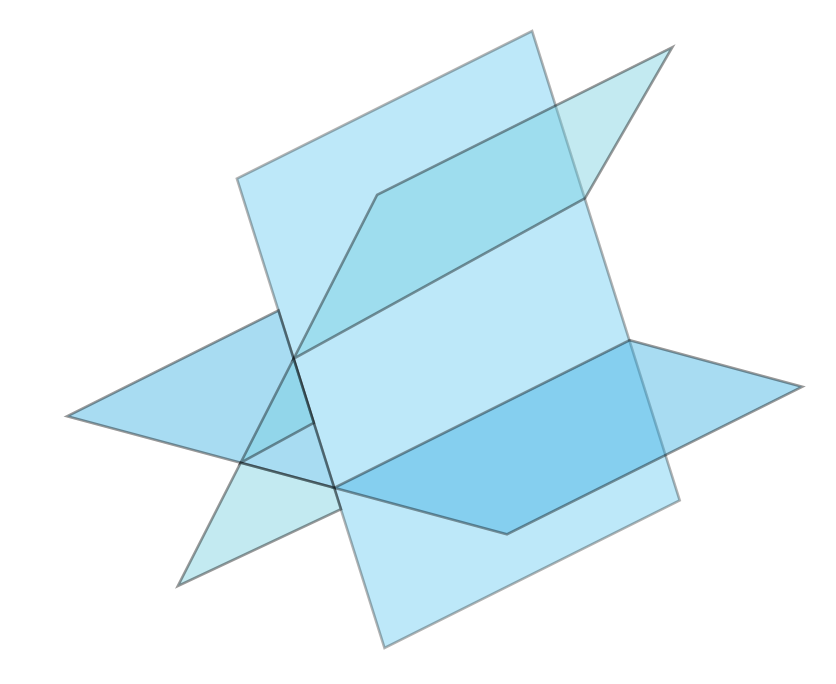
Fixons \(n=3\),
et considérons un système de taille \(m\times 3\):
\[
(*)
\left\{
\begin{array}{ccccccc}
a_{1,1}x_1 &+& a_{1,2}x_2 &+& a_{1,3}x_3 &=&b_1\,, \\
a_{2,1}x_1 &+& a_{2,2}x_2 &+& a_{2,3}x_3 &=&b_2\,, \\
&& &&&\vdots& \\
a_{m,1}x_1 &+& a_{m,2}x_2 &+& a_{m,3}x_3 &=&b_m\,.
\end{array}
\right.
\]
Ici, un triplet \((x_1,x_2,x_3)\)
peut s'interpréter comme les coordonnées d'un point
dans l'espace, relativement à un repère orthonormé fixé.
Aussi, on sait (voir cours de géométrie analytique) qu'une contrainte de la
forme
\[
\begin{array}{ccccccc}
a_{k,1}x_1 &+& a_{k,2}x_2 &+& a_{k,3}x_3 &=&b_k
\end{array}
\]
signifie que le point de coordonnées \((x_1,x_2,x_3)\) est sur
un plan.
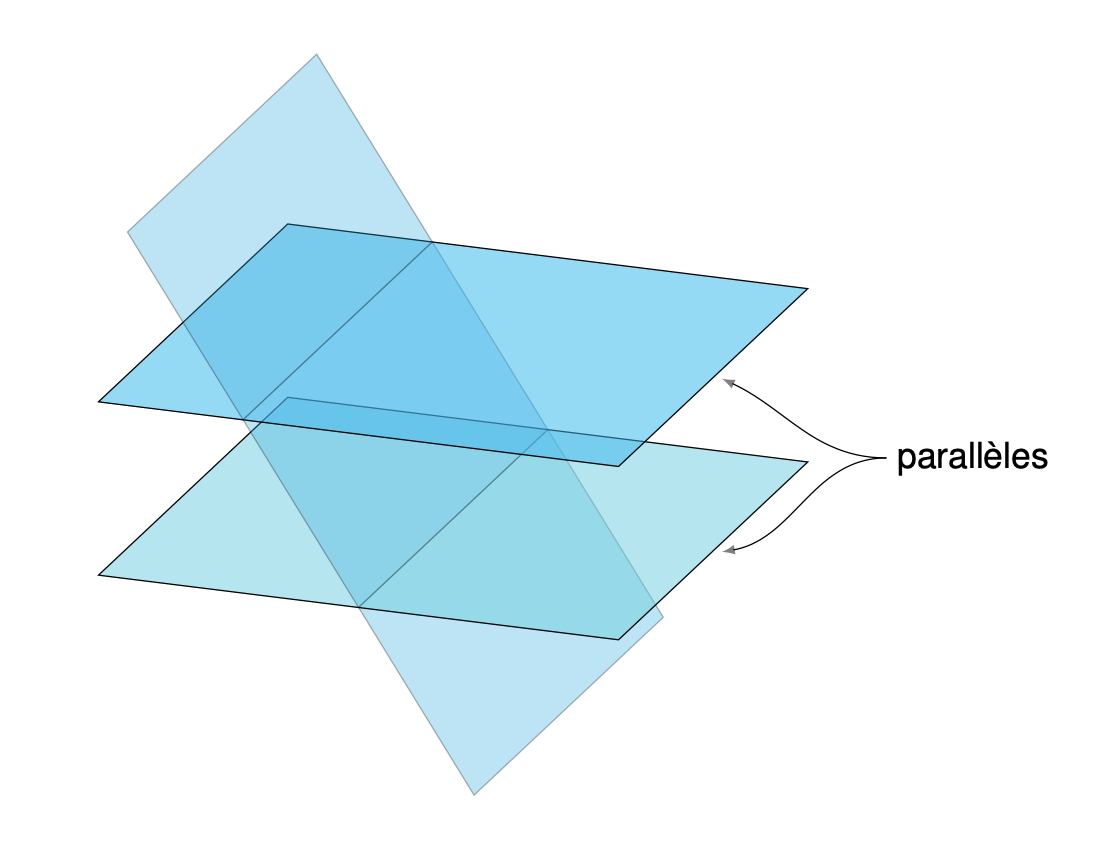
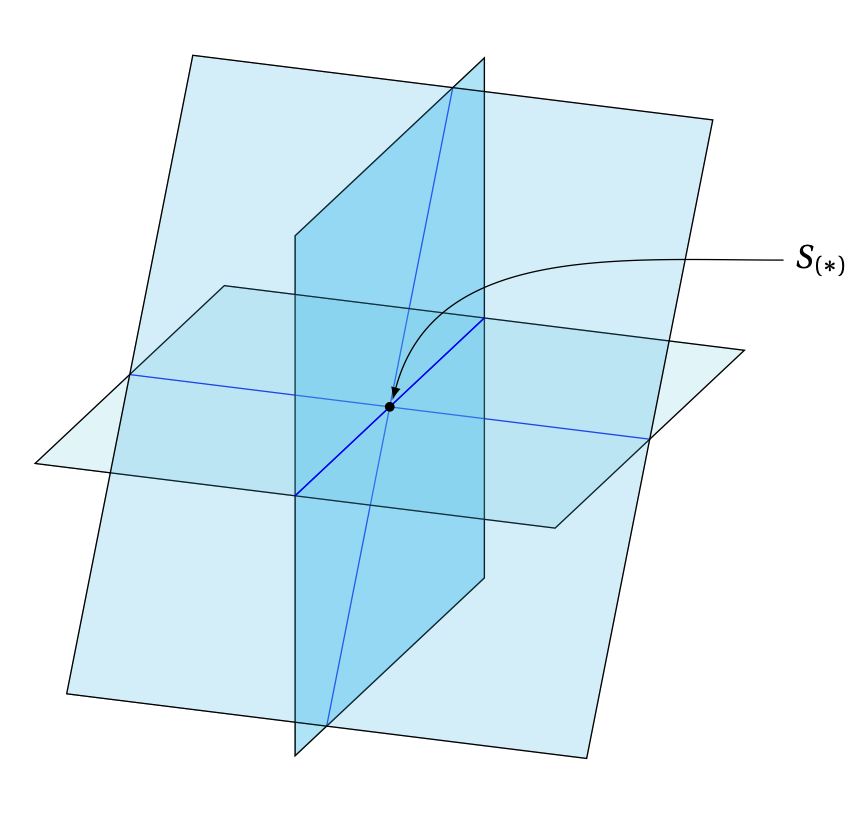
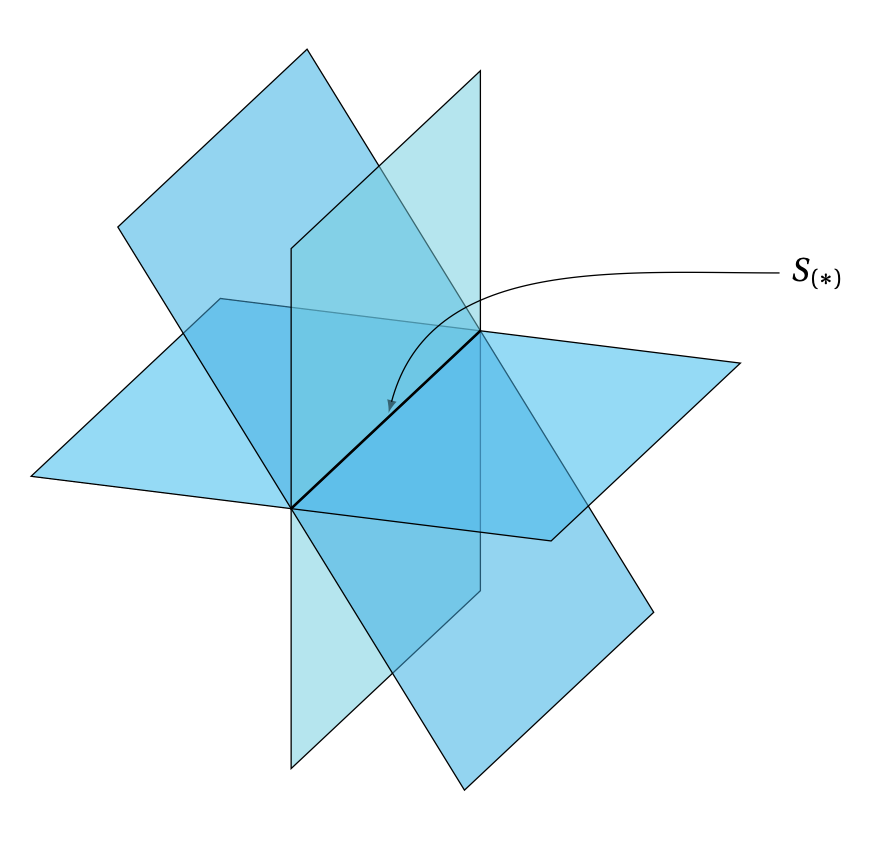
Donc un triplet \((x_1,x_2,x_3)\) sera
solution de \((*)\) si et seulement si le point
\((x_1,x_2,x_3)\) appartient en même temps à chacun des
\(m\) plans spécifiés.
Or ici aussi
il est géométriquement clair que \(S_{(*)}\) ne peut contenir que \(0\), \(1\) ou
une infinité de points.
Dernière compilation: 2025-09-02 (09:33:29)
Sauf indication contraire, le contenu de ce document est soumis à une licence Creative Commons internationale, Attribution: Pas d'Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 (CC BY-NC-SA 4.0)
