Soient \(\boldsymbol{v}_1,\boldsymbol{v}_2,\dots,\boldsymbol{v}_k\) des vecteurs de \(\mathbb{R}^n\).
Une somme du type
\[
\lambda_1\boldsymbol{v}_1+\dots+\lambda_k\boldsymbol{v}_k\,,
\]
où les \(\lambda_1,\lambda_2,\dots,\lambda_k\) sont des scalaires fixés,
est appelée
combinaison linéaire des vecteurs \(\boldsymbol{v}_1,\dots,\boldsymbol{v}_k\).
Les scalaires
\(\lambda_j\) sont les coefficients de la combinaison linéaire.
Dans \(\mathbb{R}^2\), considérons \(\boldsymbol{v}_1=\binom{3}{5}\),
\(\boldsymbol{v}_2=\binom{-1}{2}\).
En prenant \(\lambda_1=-2\), \(\lambda_2=3\),
\[
\lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2=
-2\binom{3}{5}+3\binom{-1}{2}=
\binom{-9}{-4}\,.
\]
Fixons maintenant un vecteur: \(\boldsymbol{w}=\binom{5}{-2}\), et posons la question:
peut-on écrire \(\boldsymbol{w}\)
comme une combinaison linéaire de \(\boldsymbol{v}_1\), \(\boldsymbol{v}_2\)?
Il s'agit donc de
voir si il existe des scalaires \(\lambda_1,\lambda_2\) tels que
\[
\lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2=\boldsymbol{w}\,.
\]
Lorsqu'on exprime cette relation en composantes,
\[
\binom{3\lambda_1-\lambda_2}{5\lambda_1+2\lambda_2}
=
\binom{5}{-2}
\]
Puisque deux vecteurs sont égaux si et seulement si leurs composantes sont
égales deux-à-deux, on en déduit que \(\lambda_1\) et \(\lambda_2\) doivent
être solution du système
\[
\left\{
\begin{array}{c}
3\lambda_1 &-& \lambda_2 &=&5 \\
5\lambda_1 &+& 2\lambda_2 &=&-2
\end{array}
\right.
\]
La solution de ce système
est unique, donnée par
\(\lambda_1=\frac{8}{11}\), \(\lambda_2=\frac{-31}{11}\). On en déduit que
\(\boldsymbol{w}\) est bien combinaison linéaire de \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\):
\[
\boldsymbol{w}=\tfrac{8}{11}\boldsymbol{v}_1-\tfrac{31}{11}\boldsymbol{v}_2\,.
\]
Plus généralement,
fixons deux vecteurs \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\) dans
le plan, et considérons toutes les combinaisons linéaires de la forme
\[ \boldsymbol{w}=\lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2\,,\qquad
\lambda_1,\lambda_2\in \mathbb{R}\,.
\]
On remarque que
Si \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\) ne sont pas colinéaires, alors
ils engendrent le plan: n'importe quel vecteur \(\boldsymbol{w}\) peut s'écrire
comme combinaison linéaire de \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\).
Si \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\) sont colinéaires, alors
seulement certains vecteurs \(\boldsymbol{w}\) du plan peuvent s'écrire comme
combinaison linéaire de \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\).
Dans \(\mathbb{R}^3\), considérons
\[
\boldsymbol{v}_1=
\begin{pmatrix}
-3\\
2\\
0
\end{pmatrix}
\,,\quad
\boldsymbol{v}_2=
\begin{pmatrix}
1\\
1\\
-1
\end{pmatrix}
\,,\quad
\boldsymbol{w}=
\begin{pmatrix}
4\\
0\\
3
\end{pmatrix}
\]
Est-ce que \(\boldsymbol{w}\) est combinaison linéaire de \(\boldsymbol{v}_1\) et
\(\boldsymbol{v}_2\)? Pour le savoir, cherchons
\(\lambda_1,\lambda_2\) tels que
\[
\lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2=\boldsymbol{w}\,,
\]
qui mène au système
\[
\left\{
\begin{array}{c}
-3\lambda_1 &+& \lambda_2 &=&4 \\
2\lambda_1 &+& \lambda_2 &=&0 \\
&-& \lambda_2 &=&3
\end{array}
\right.
\]
Ce système est incompatible, donc \(\boldsymbol{w}\) ne peut pas
s'écrire comme combinaison linéaire de \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\).
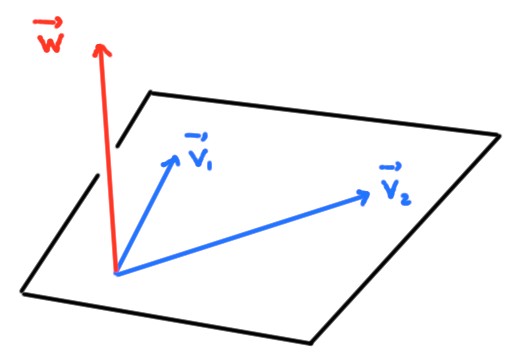
Ce dernier exprime un fait géométrique intuitif. En effet, toutes les
combinaisons linéaires possibles de deux vecteurs
non-colinéaires de \(\mathbb{R}^3\) ne donneront que des vecteurs contenus dans un
plan, et le \(\boldsymbol{w}\)
ci-dessus n'est pas dans ce plan:
Dans ce dernier exemple, on a répondu à une question à propos d'une
combinaison linéaire en l'exprimant sous la forme d'un
système linéaire. Dans la section suivante nous ferons l'inverse,
en montrant qu'un système linéaire peut se traduire en une question de
combinaison linéaire.
Parties engendrées
En algèbre linéaire, utiliser des
combinaisons linéaires est l'opération de base permettant
de créer des nouveaux vecteurs à partir d'une famille de vecteurs donnés.
Soient
\(\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\) des vecteurs de \(\mathbb{R}^n\) donnés.
La
partie de \(\mathbb{R}^n\) engendrée par la famille
\(\{\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\}\),
notée
\[\mathrm{Vect}\{\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\}\,,\]
est définie comme l'ensemble des vecteurs de \(\mathbb{R}^n\) qui peuvent
s'écrire comme combinaison linéaire des vecteurs
\(\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\):
\[\boldsymbol{w}=\lambda_1\boldsymbol{v}_1+\cdots+\lambda_p\boldsymbol{v}_p\,.\]
Pour les familles contenant un ou deux vecteurs:
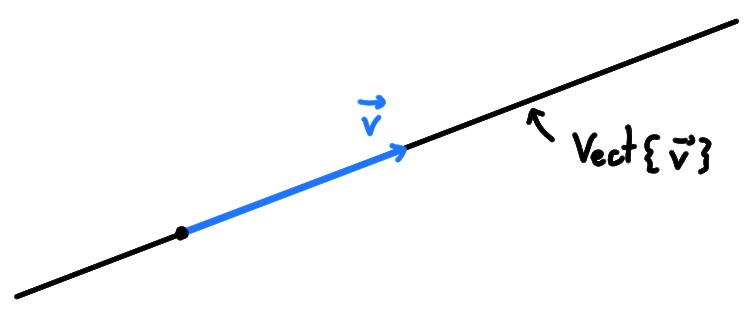
Lorsqu'on considère une famille \(\{\boldsymbol{v}\}\) contenant un seul
vecteur non-nul \(\boldsymbol{v}\), \(\mathrm{Vect}\{\boldsymbol{v}\}\) est constitué de
tous les vecteurs colinéaires à \(\boldsymbol{v}\), c'est-à-dire de
la forme \(\boldsymbol{w}=\lambda\boldsymbol{v}\). Il est donc naturel d'interpréter
\(\mathrm{Vect}\{\boldsymbol{v}\}\) comme
la droite de \(\mathbb{R}^n\) engendrée par \(\boldsymbol{v}\), passant par l'origine:
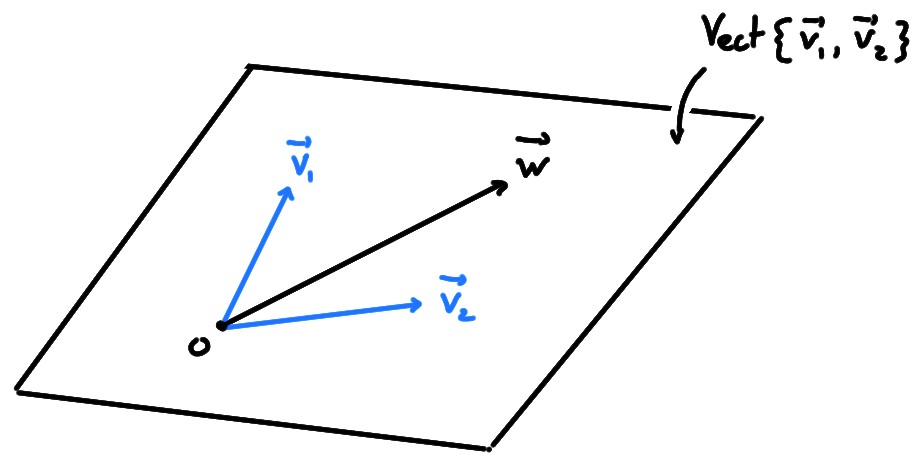
Lorsqu'on considère une famille \(\{\boldsymbol{v}_1,\boldsymbol{v}_2\}\) contenant deux
vecteurs non-colinéaires,
\(\mathrm{Vect}\{\boldsymbol{v}_1,\boldsymbol{v}_2\}\) est constitué de
toutes les combinaisons linéaires
\(\boldsymbol{w}=\lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2\).
Il est donc naturel d'interpréter
\(\mathrm{Vect}\{\boldsymbol{v}_1,\boldsymbol{v}_2\}\) comme
le plan de \(\mathbb{R}^n\) engendrée par \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\),
passant par l'origine:
Même si cette terminologie (''droite'', ''plan'') est empruntée à la géométrie
du plan \((n=2)\) et de l'espace (\(n=3\)), nous
l'utiliserons aussi dans les dimensions supérieures (\(n\gt 3\)).
Quiz 2.3-1 :
Soient \(\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\) des vecteurs de \(\mathbb{R}^3\), et soit
\(W=\mathrm{Vect}\{\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\}\).
Vrai ou faux?
\(W\) contient le vecteur nul \(\boldsymbol{0}\).
Si \(p=2\), alors \(W\) est un plan.
Si \(p>2\), alors \(W\) n'est pas un plan.
Si \(\boldsymbol{w}_1,\boldsymbol{w}_2\in W\), alors
\(\alpha_1\boldsymbol{w}_1+\alpha_2\boldsymbol{w}_2\in W\), peu importe les
valeurs des scalaires \(\alpha_1,\alpha_2\).