La notion d'indépendance linéaire (et celle qui lui est associée,
la dépendance linéaire) est une des plus importantes de
l'algèbre linéaire.
En effet, il sera important de comprendre comment des vecteurs
peuvent être utilisés pour ''remplir l'espace'', à l'aide de combinaisons
linéaires.
Pour ce faire, il faudra pouvoir décrire dans quelle mesure
ces vecteurs
pointent dans des dimensions différentes de \(\mathbb{R}^n\).
Et pour avoir en main une notion qui permette de travailler (et faire des
calculs!), il
faut introduire une définition abstraite, qui s'utilise en toute dimension.
Cette notion, c'est l'indépendance linéaire.
Motivation: une caractérisation de la non-colinéarité
En guise de motivation, considérons deux vecteurs dans le plan.
Clairement, si ces vecteurs ne sont pas colinéaires, c'est qu'ils pointent dans
des directions différentes.
Or on peut reformuler ce que signifie être
non-colinéaire un peu différemment.
Fixons deux vecteurs du plan, \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\),
et étudions toutes les combinaisons linéaires de la forme
\[
\boldsymbol{w}=\lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2\,,\qquad
\lambda_1,\lambda_2\in \mathbb{R}\,.
\]
Bien-sûr, quels que soient \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\),
on a \(\boldsymbol{w}=\boldsymbol{0}\) dès que \(\lambda_1=\lambda_2=0\), puisque
\[0\boldsymbol{v}_1+0\boldsymbol{v}_2=\boldsymbol{0}\,.\]
Mais posons-nous la question de savoir
s'il existe d'autres paires \((\lambda_1,\lambda_2)\) telles que
\(\boldsymbol{w}=\boldsymbol{0}\).
Par un simple calcul, ou en utilisant l'animation ci-dessus
,
on se convainc facilement des deux faits suivants:
Si \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\) ne sont pas colinéaires, alors l'unique façon
d'avoir \(\boldsymbol{w}=\boldsymbol{0}\) est de prendre \(\lambda_1=\lambda_2=0\).
Si \(\boldsymbol{v}_1\) et \(\boldsymbol{v}_2\) sont colinéaires, alors il existe une
infinité de choix possibles pour
\(\lambda_1\) et \(\lambda_2\) qui garantissent \(\boldsymbol{w}=\boldsymbol{0}\).
La même chose fonctionne en toute dimension.
On conclut de cette simple discussion que la non-colinéarité, pour
deux vecteurs, peut s'exprimer de
façon plus abstraite, par cette condition à propos de leurs combinaisons
linéaires nulles:
Lemme:
Deux vecteurs non-nuls
\(\boldsymbol{v}_1,\boldsymbol{v}_2\in \mathbb{R}^n\) sont
non-colinéaires si et seulement si l'unique combinaison linéaire nulle,
\[
\lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2=\boldsymbol{0}\,,
\]
est celle pour laquelle \(\lambda_1=\lambda_2=0\).
L'avantage de cette caractérisation de la
non-colinéarité de deux vecteurs, proposée
dans le lemme précédent,
est qu'elle se généralise naturellement
à des familles contenant plus que deux vecteurs (de \(\mathbb{R}^n\)).
Voyons comment, dans la section suivante.
Définition
Soient
\(\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\) des vecteurs de \(\mathbb{R}^n\) donnés.
La famille \(\{\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\}\) est dite
linéairement indépendante
(ou libre) si l'unique combinaison linéaire nulle,
\[
\lambda_1\boldsymbol{v}_1+\cdots +\lambda_p\boldsymbol{v}_p=\boldsymbol{0}
\]
est celle pour laquelle \(\lambda_1=\lambda_2=\cdots=\lambda_p=0\).
dépendante
(ou liée) si il existe des coefficients
\(\lambda_1,\lambda_2,\dots,\lambda_p\), dont au moins un n'est pas nul, tels que
\[
\lambda_1\boldsymbol{v}_1+\cdots +\lambda_p\boldsymbol{v}_p=\boldsymbol{0}\,.
\]
Remarque:
Dès qu'un des vecteurs de la famille
\(\{\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\}\) est nul, cette famille est dépendante.
En effet, supposons que \(\boldsymbol{v}_k= \boldsymbol{0}\). On peut alors écrire
l'identité suivante, toujours vraie,
\[
0\boldsymbol{v}_1+0\boldsymbol{v}_2+\cdots+0\boldsymbol{v}_{k-1}+1\underbrace{\boldsymbol{v}_k}_{=\boldsymbol{0}}+
0\boldsymbol{v}_{k+1}+\cdots+0\boldsymbol{v}_p=\boldsymbol{0}\,,
\]
qui implique bien que \(\{\boldsymbol{v}_1,\cdots,\boldsymbol{v}_p\}\) est dépendante.
Exemple:
Considérons la famille de vecteurs de \(\mathbb{R}^4\) contenant les trois vecteurs
\[
\boldsymbol{v}_1= \begin{pmatrix} 1\\ 0\\2 \\-3 \end{pmatrix}\,,\qquad
\boldsymbol{v}_2= \begin{pmatrix} 0\\ -2\\1 \\5 \end{pmatrix}\,,\qquad
\boldsymbol{v}_3= \begin{pmatrix} 3\\ 2\\1 \\0 \end{pmatrix}\,.
\]
Cette famille est-elle libre ou liée? Pour répondre, considérons la relation
linéaire
\[ \lambda_1\boldsymbol{v}_1+\lambda_2\boldsymbol{v}_2+\lambda_3\boldsymbol{v}_3=\boldsymbol{0}\,.
\]
Lorsqu'on écrit explicitement cette relation en composantes, on obtient le
système \(4\times 3\) suivant:
\[
\left\{
\begin{array}{ccccccc}
\lambda_1 && &+& 3\lambda_3 &=&0 \\
&-& 2\lambda_2 &+& 2\lambda_3 &=& 0\\
2\lambda_1 &+& \lambda_2 &+& \lambda_3 &=&0 \\
-3\lambda_1 &+& 5\lambda_2 && &=&0
\end{array}
\right.
\]
La matrice augmentée de ce système devient, après échelonnage,
\[
\left(
\begin{array}{ccc|c}
1&0&3&0\\
0&1&-1&0\\
0&0&1&0\\
0&0&0&0
\end{array}
\right)\,.
\]
La solution du système correspondant est
\(\lambda_1=\lambda_2=\lambda_3=0\). On conclut que
\(\{\boldsymbol{v}_1,\boldsymbol{v}_2,\boldsymbol{v}_3\}\) est une famille libre.
Exemple:
Montrons que la famille formée des vecteurs de la base canonique de \(\mathbb{R}^n\),
\(\{\boldsymbol{e}_1,\dots,\boldsymbol{e}_n\}\), est libre.
Pour ce faire, considérons la relation linéaire
\[ \lambda_1\boldsymbol{e}_1+\lambda_2\boldsymbol{e}_2+\cdots+\lambda_n\boldsymbol{e}_n=\boldsymbol{0}\,.
\]
Lorsqu'on l'exprime en composantes, cette dernière devient
\[
\left\{
\begin{array}{ccc}
\lambda_1 &=&0 \\
\lambda_2 &=&0\\
&\vdots&\\
\lambda_n &=&0
\end{array}
\right.\,,
\]
qui montre bien que la famille est libre.
Théorème:
Une famille \(\{\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\}\)
est liée si et seulement si un de ses vecteurs peut s'écrire comme combinaison
linéaire des autres, plus précisément: si il existe \(k\in \{1,\dots,p\}\) tel que
\(\boldsymbol{v}_k\) peut s'écrire comme combinaison linéaire des \(\boldsymbol{v}_j\),
\(j\neq k\).
Si la famille est liée, alors il existe des nombres
\(\lambda_1,\dots,\lambda_p\), non tous nuls, tels que
\[
\lambda_1\boldsymbol{v}_1+\cdots+\lambda_k\boldsymbol{v}_k+\cdots +\lambda_p\boldsymbol{v}_p=\boldsymbol{0}\,.
\]
Si on supposons que le coefficient \(\lambda_k\neq 0\), on peut isoler
\(\boldsymbol{v}_k\) dans cette dernière:
\[ \boldsymbol{v}_k =
\sum_{\substack{j=1\\ j\neq k}}^p\frac{(-\lambda_j)}{\lambda_k}\boldsymbol{v}_j\,.
\]
On a donc bien
exprimé \(\boldsymbol{v}_k\) comme combinaison linéaire des autres.
Inversément, si un \(\boldsymbol{v}_k\) peut s'écrire comme combinaison linéaire des
autres,
\[ \boldsymbol{v}_k = \sum_{\substack{j=1\\ j\neq k}}^p\alpha_j\boldsymbol{v}_j\,,
\]
et on peut récrire cette dernière comme
\[
\alpha_1\boldsymbol{v}_1+\cdots
+\alpha_{k-1}\boldsymbol{v}_{k-1}+
(-1)\boldsymbol{v}_k
+\alpha_{k+1}\boldsymbol{v}_{k+1}+
\cdots
+\alpha_p\boldsymbol{v}_p=\boldsymbol{0}\,,
\]
qui montre bien que la famille est liée.
À la lumière de ce dernier théorème, illustrons encore
la différence libre/liée dans le cas simple de trois vecteurs dans \(\mathbb{R}^3\).
Exemple:
Considérons une famille de trois vecteurs de \(\mathbb{R}^3\),
\(\mathcal{F}=\{\boldsymbol{v}_1,\boldsymbol{v}_2,\boldsymbol{v}_3\}\).
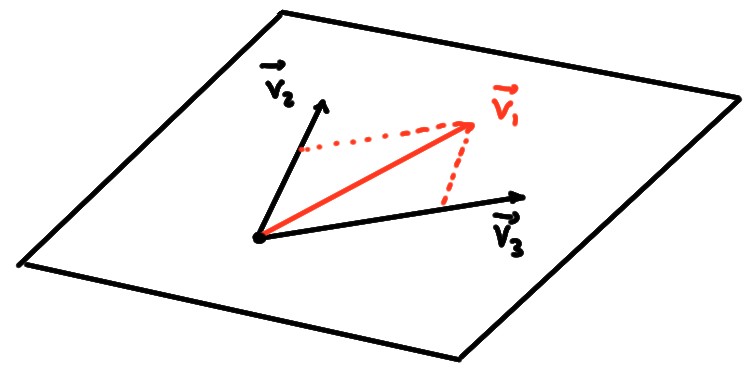
Si \(\mathcal{F}\) est liée, alors le théorème précédent implique que l'un des vecteurs,
disons \(\boldsymbol{v}_1\), peut s'écrire comme combinaison linéaire des deux autres.
En d'autres termes, cela signifie que \(\boldsymbol{v}_1\) est dans le plan engendré
par \(\boldsymbol{v}_2,\boldsymbol{v}_3\):
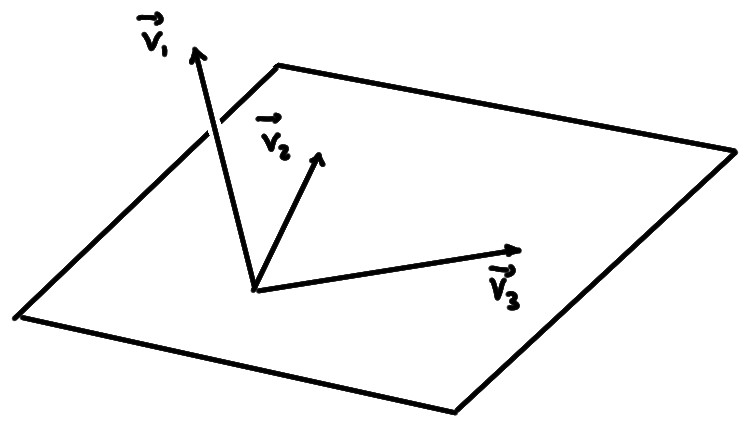
Par contre, si \(\mathcal{F}\) est libre, alors le théorème implique qu'aucun
des vecteurs ne peut s'écrire comme combinaison linéaire des autres (aucun n'est
dans le plan engendré par les deux autres), ce qui
exprime bien le fait que ces trois vecteurs
pointent tous dans des dimensions différentes:
Quiz 2.4-1 :
Soit \(\mathcal{F}=\{\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\}\) une famille de vecteurs de \(\mathbb{R}^n\).
Vrai ou faux?
Si \(\mathcal{F}\) n'est pas libre, alors elle est liée.
Si \(\mathcal{F}\) n'est pas liée, alors elle est libre.
Si \(\mathcal{F}\) est libre, alors aucun des vecteurs \(\boldsymbol{v}_k\) n'est
nul.
Si \(\mathcal{F}\) est liée, alors au moins un des
vecteurs \(\boldsymbol{v}_k\) est nul.
Si \(\mathcal{F}\) est libre, et si on lui rajoute un vecteur, alors elle
devient liée.
Si \(\mathcal{F}\) est libre, alors toute sous-famille \(\mathcal{F}'\subset
\mathcal{F}\) est aussi libre.
Si il existe une sous-famille \(\mathcal{F}'\subset \mathcal{F}\)
libre, alors \(\mathcal{F}\) est libre.
Si il existe une sous-famille \(\mathcal{F}'\subset \mathcal{F}\)
liée, alors \(\mathcal{F}\) est liée.
Si \(p=1\), et si le seul vecteur de \(\mathcal{F}\) est non-nul,
alors \(\mathcal{F}\) est libre.
Quiz 2.4-2 :
Soit \(\{\boldsymbol{v}_1,\dots,\boldsymbol{v}_p\}\) une famille libre de \(\mathbb{R}^n\).
Vrai ou faux?