La notion d'orthogonalité permet d'introduire en algèbre linéaire plusieurs
notions géométriques très utiles. La première est celle de
projection.
Comme motivation, fixons un vecteur \(\boldsymbol{w}\in\mathbb{R}^n\), et posons la question
suivante: Pour un deuxième \(\boldsymbol{v}\in\mathbb{R}^n\) donné, comment
définir la projection orthogonale de \(\boldsymbol{v}\)
sur \(\boldsymbol{w}\)?
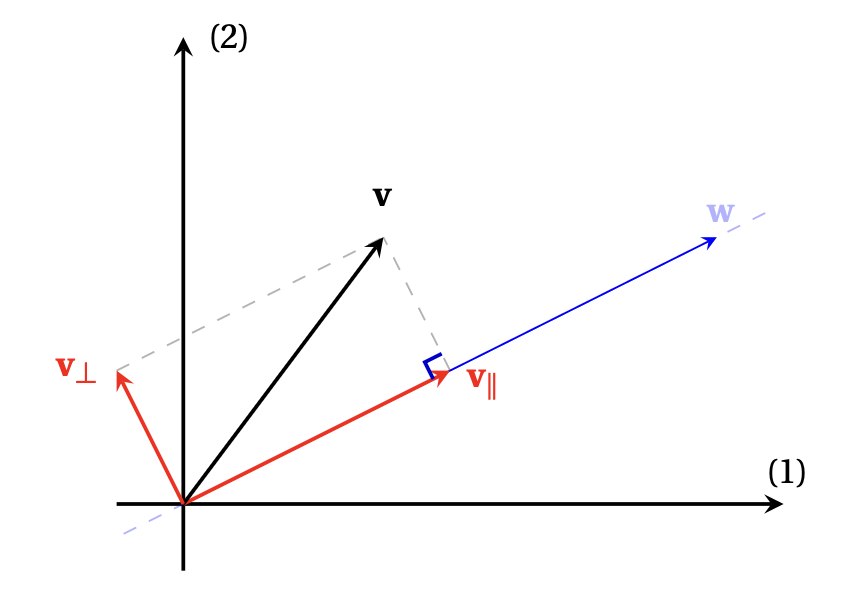
Un schéma peut aider à comprendre comment nous allons procéder (attention: cette image est représentée dans le plan, mais l'argument qui suit fonctionne en toute dimension!):
La projection orthogonale de \(\boldsymbol{v}\) sur \(\boldsymbol{w}\), que nous noterons \(\boldsymbol{v}_\parallel\) pour commencer, doit permettre de décomposer \(\boldsymbol{v}\) en deux composantes vectorielles, \[ \boldsymbol{v}=\boldsymbol{v}_\parallel+\boldsymbol{v}_\perp\,, \] où
Il se trouve que ces deux conditions caractérisent entièrement
\(\boldsymbol{v}_\parallel\) et \(\boldsymbol{v}_\perp\).
En effet, pour que \(\boldsymbol{v}_\parallel\) soit colinéaire à
\(\boldsymbol{w}\), il doit exister un scalaire \(\alpha\)
tel que
\[ \boldsymbol{v}_\parallel=\alpha\boldsymbol{w}\,.
\]
Puis, pour que \(\boldsymbol{v}_\perp\) soit orthogonal à \(\boldsymbol{w}\), il faut que
\[ 0=\boldsymbol{v}_\perp\cdotp \boldsymbol{w}
=(\boldsymbol{v}-\boldsymbol{v}_\parallel)\cdotp \boldsymbol{w}
=(\boldsymbol{v}-\alpha \boldsymbol{w})\cdotp \boldsymbol{w}\,.
\]
De cette dernière relation, on tire que
\[ \alpha
=\frac{\boldsymbol{v}\cdotp\boldsymbol{w}}{\boldsymbol{w}\cdotp\boldsymbol{w}}
=\frac{\boldsymbol{v}\cdotp\boldsymbol{w}}{\|\boldsymbol{w}\|^2}\,.
\]
En utilisant ce scalaire particulier dans \(\boldsymbol{v}_\parallel=\alpha\boldsymbol{w}\),
ceci motive la définition suivante:
\[ \mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v}):= \frac{\boldsymbol{v}\cdotp\boldsymbol{w}}{\boldsymbol{w}\cdotp\boldsymbol{w}}\boldsymbol{w} =\frac{\boldsymbol{v}\cdotp\boldsymbol{w}}{\|\boldsymbol{w}\|^2}\boldsymbol{w}\,. \]
Exemple: Dans \(\mathbb{R}^5\), la projection orthogonale de \[ \boldsymbol{v}= \begin{pmatrix} 0\\2 \\-3 \\1 \\-1 \end{pmatrix}\qquad \text{ sur } \qquad \boldsymbol{w}= \begin{pmatrix} 1\\0 \\-1 \\0 \\1 \end{pmatrix} \] est donnée par \[ \mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v}) =\frac{\boldsymbol{v}\cdotp\boldsymbol{w}}{\|\boldsymbol{w}\|^2}\boldsymbol{w} =\frac{2}{3} \begin{pmatrix} 1\\0 \\-1 \\0 \\1 \end{pmatrix} = \begin{pmatrix} 2/3\\0 \\-2/3 \\0 \\2/3 \end{pmatrix}\,. \]
Remarque: La définition de \(\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})\) dépend uniquement de la direction de \(\boldsymbol{w}\), pas de son sens ni de sa norme. En effet, la projection sur un vecteur colinéaire à \(\boldsymbol{w}\), \(\boldsymbol{w}'=\lambda\boldsymbol{w}\), donne le même résultat, puisque \[\begin{aligned} \mathrm{proj}_{\boldsymbol{w}'}(\boldsymbol{v}) &=\frac{\boldsymbol{v}\cdotp\boldsymbol{w}'}{\|\boldsymbol{w}'\|^2}\boldsymbol{w}'\\ &=\frac{\boldsymbol{v}\cdotp(\lambda\boldsymbol{w})}{\|\lambda\boldsymbol{w}\|^2}(\lambda\boldsymbol{w})\\ &=\frac{\boldsymbol{v}\cdotp\boldsymbol{w}}{\|\boldsymbol{w}\|^2}\boldsymbol{w}\\ &=\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})\,. \end{aligned}\] Donc il est plus juste de penser à la projection sur un vecteur comme à la projection sur la droite engendrée par ce vecteur.
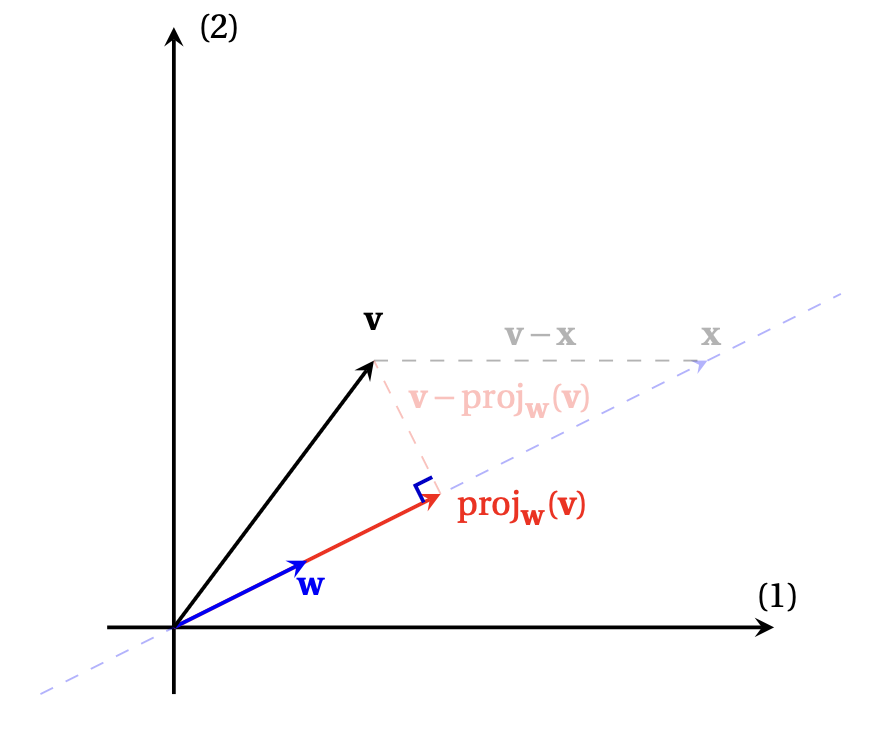
La projection de \(\boldsymbol{v}\) sur \(\boldsymbol{w}\) est aussi optimale, dans le sens où c'est elle qui réalise la distance minimale entre \(\boldsymbol{v}\) et un vecteur quelconque de la droite dirigée par \(\boldsymbol{w}\):
Théorème: Soit \(\boldsymbol{w}\in\mathbb{R}^n\) non-nul, et soit \(W=\mathrm{Vect}\{\boldsymbol{w}\}\). Alors \[ \|\boldsymbol{v}-\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})\|\leqslant \|\boldsymbol{v}-\boldsymbol{x}\|\,, \qquad \forall \boldsymbol{x}\in W\,. \] Comme \(\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})\in W\), ceci implique \[ \|\boldsymbol{v}-\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})\|= \min_{\boldsymbol{x}\in W}\|\boldsymbol{v}-\boldsymbol{x}\|\,. \] De plus, \(\mathrm{proj}_W(\boldsymbol{v})\) est l'unique vecteur de \(W\) qui réalise ce minimum. On dit ainsi que \(\mathrm{proj}_W(\boldsymbol{v})\) donne la meilleure approximation de \(\boldsymbol{v}\) avec des vecteurs de \(W\).
En d'autres termes, \(\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})\) est le vecteur de \(W\) dont la distance à \(\boldsymbol{v}\) est minimale:
Pour tout \(\boldsymbol{x}\in W\), on peut écrire \[ \boldsymbol{v}-\boldsymbol{x}=(\underbrace{\boldsymbol{v}-\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})}_{\in W^\perp}) +(\underbrace{\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})-\boldsymbol{x}}_{\in W})\,. \] On a donc \[\begin{aligned} \|\boldsymbol{v}-\boldsymbol{x}\|^2 &=\|\boldsymbol{v}-\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})\|^2 +\underbrace{\|\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})-\boldsymbol{x}\|^2}_{\geqslant 0}\\ &\geqslant\|\boldsymbol{v}-\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})\|^2\,. \end{aligned}\] Supposons maintenant qu'il existe, en plus de \(\boldsymbol{v}_\parallel=\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})\), un autre vecteur de \(W\) satisfaisant la même propriété; notons-le \(\boldsymbol{v}_\parallel'\). Alors par définition, \[ \|\boldsymbol{v}-\boldsymbol{v}_\parallel\| =\min_{\boldsymbol{x}\in W}\|\boldsymbol{v}-\boldsymbol{x}\| = \|\boldsymbol{v}-\boldsymbol{v}_\parallel'\|\,. \] Aussi, \[\begin{aligned} \|\boldsymbol{v}-\boldsymbol{v}_\parallel'\|^2 &=\|(\underbrace{\boldsymbol{v}-\boldsymbol{v}_\parallel}_{\in W^\perp})+( \underbrace{\boldsymbol{v}_\parallel-\boldsymbol{v}_\parallel'}_{\in W})\|^2\\ &=\|\boldsymbol{v}-\boldsymbol{v}_\parallel\|^2 + \|\boldsymbol{v}_\parallel-\boldsymbol{v}_\parallel'\|^2\,. \end{aligned}\] On a donc \[ \|\boldsymbol{v}_\parallel-\boldsymbol{v}_\parallel'\|^2=0\,, \] qui implique \(\boldsymbol{v}_\parallel=\boldsymbol{v}_\parallel'\).
Le fait que \(\mathrm{proj}_{\boldsymbol{w}}(\boldsymbol{v})\) réalise un minimum indique que certains problèmes d'optimisation pourront trouver une solution par l'utilisation de projections (voir la Méthode des moindres carrés à partir de la Section (cliquer)).
Dernière compilation: 2025-09-02 (09:33:31)
Sauf indication contraire, le contenu de ce document est soumis à une licence Creative Commons internationale, Attribution: Pas d'Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 (CC BY-NC-SA 4.0)
