13.3 Sur les espaces propres d'une matrice symétrique
Commençons par une propriété élémentaire du produit scalaire:
Soit \(B\) une matrice de taille \(n\times n\) quelconque. Alors pour tous
\(\boldsymbol{x},\boldsymbol{y}\in\mathbb{R}^n\),
\[ (B\boldsymbol{x})\cdotp \boldsymbol{y}=\boldsymbol{x}\cdotp(B^T\boldsymbol{y})\,. \]
En particulier, si \(B\) est symétrique, alors
\[ (B\boldsymbol{x})\cdotp \boldsymbol{y}=\boldsymbol{x}\cdotp(B\boldsymbol{y})\,. \]
Par l'interprétation matricielle du produit scalaire,
\[ (B\boldsymbol{x})\cdotp \boldsymbol{y}=
(B\boldsymbol{x})^T\boldsymbol{y}=\boldsymbol{x}^TB^T\boldsymbol{y}=\boldsymbol{x}^T(B^T\boldsymbol{y})=
\boldsymbol{x}\cdotp(B^T\boldsymbol{y})\,.\]
Une conséquence immédiate:
Soit \(G\) une matrice orthogonale de taille \(n\times n\).
Alors pour tous
\(\boldsymbol{x},\boldsymbol{y}\in\mathbb{R}^n\),
Supposons que \(G\) est orthogonale.
Par le lemme précédent,
\[
(G\boldsymbol{x})\cdotp(G\boldsymbol{y})=\boldsymbol{x}\cdotp(G^TG\boldsymbol{y})
=\boldsymbol{x}\cdotp\boldsymbol{y}\,.
\]
La deuxième identité s'obtient en prenant \(\boldsymbol{y}=\boldsymbol{x}\).
Remarque:
La deuxième propriété montre qu'une application linéaire définie par une matrice
orthogonale est une isométrie, c'est-à-dire qu'elle ne change pas la
longueur d'un vecteur (seulement sa direction).
Exemple:
Un exemple typique d'isométrie est la
rotation d'angle \(\theta\) dans le plan:
Rappelons que la matrice de cette rotation relative à la base canonique est
donnée par
\[
[\mathrm{rot}_\theta]_{\mathcal{B}_{\mathrm{can}}}=
\begin{pmatrix}
\cos(\theta)&-\sin(\theta)\\
\sin(\theta)&\cos(\theta)
\end{pmatrix}\,.
\]
Cette matrice est orthogonale puisque ses colonnes sont unitaires et
perpendiculaires entre elles:
\[\begin{aligned}
{[\mathrm{rot}_\theta]_{\mathcal{B}_{\mathrm{can}}}}^{\!\!T}
[\mathrm{rot}_\theta]_{\mathcal{B}_{\mathrm{can}}}
&=
\begin{pmatrix}
\cos(\theta)&\sin(\theta)\\
-\sin(\theta)&\cos(\theta)
\end{pmatrix}
\begin{pmatrix}
\cos(\theta)&-\sin(\theta)\\
\sin(\theta)&\cos(\theta)
\end{pmatrix}\\
&=I_2\,.
\end{aligned}\]
On sait que pour une matrice quelconque,
des vecteurs propres associés à des valeurs propres distinctes
sont indépendants. Pour une matrice symétrique, cette propriété est vérifiée
dans un sens plus fort:
Lemme:
Soit \(A\) une matrice symétrique de taille \(n\times n\). Si \(\boldsymbol{v}_1\) et
\(\boldsymbol{v}_2\) sont deux vecteurs propres de \(A\) associés à des valeurs propres
distinctes, alors \(\boldsymbol{v}_1\perp\boldsymbol{v}_2\).
Si \(A\boldsymbol{v}_1=\lambda_1\boldsymbol{v}_1\), \(A\boldsymbol{v}_2=\lambda_2\boldsymbol{v}_2\), alors
\[\begin{aligned}
\lambda_1(\boldsymbol{v}_1\cdotp\boldsymbol{v}_2)
=(\lambda_1\boldsymbol{v}_1)\cdotp\boldsymbol{v}_2
&=(A\boldsymbol{v}_1)\cdotp\boldsymbol{v}_2\\
&=\boldsymbol{v}_1\cdotp(A\boldsymbol{v}_2)
=\boldsymbol{v}_1\cdotp(\lambda_2\boldsymbol{v}_2)
=\lambda_2(\boldsymbol{v}_1\cdotp\boldsymbol{v}_2)\,,
\end{aligned}\]
qui implique \((\lambda_1-\lambda_2)(\boldsymbol{v}_1\cdotp\boldsymbol{v}_2)=0\). Donc si
\(\lambda_1\neq \lambda_2\), on a forcément que
\(\boldsymbol{v}_1\cdotp\boldsymbol{v}_2=0\).
Dans l'exemple suivant, nous vérifierons ce résultat sur un exemple concret, et
nous observerons encore une propriété qui sera énoncée comme un résultat
général dans la prochaine section.
Exemple:
Étudions les espaces propres de la matrice symétrique
\[
A=
\begin{pmatrix}
3&-2&4\\
-2&6&2\\
4&2&3
\end{pmatrix}\,.
\]
On calcule son polynôme caractéristique,
\[\begin{aligned}
P_A(\lambda)
&=\det
\begin{pmatrix}
3-\lambda&-2&4\\
-2&6-\lambda&2\\
4&2&3-\lambda
\end{pmatrix}\\
&=\det
\begin{pmatrix}
7-\lambda&-2&4\\
0&6-\lambda&2\\
7-\lambda&2&3-\lambda
\end{pmatrix}\\
&=\det
\begin{pmatrix}
7-\lambda&-2&4\\
0&6-\lambda&2\\
0&4&-1-\lambda
\end{pmatrix}\\
&=-(\lambda+2)(\lambda-7)^2\,.
\end{aligned}\]
Donc \(A\) possède deux valeurs
propres, \(\lambda_1=-2\) et \(\lambda_2=7\). Les espaces propres associés
se calculent facilement:
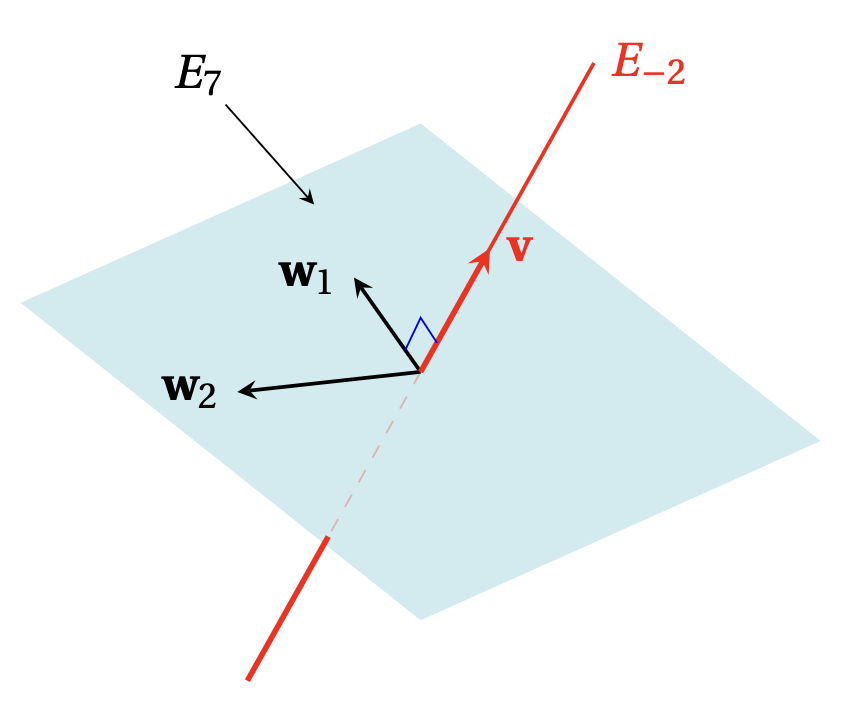
\(E_{-2}=\mathrm{Vect}\{\boldsymbol{v}\}\), où
\(\boldsymbol{v}= \begin{pmatrix} 2\\1 \\-2 \end{pmatrix} \),
On remarque qu'effectivement, \(\boldsymbol{v}\perp\boldsymbol{w}_1\), et
\(\boldsymbol{v}\perp\boldsymbol{w}_2\), et donc n'importe quel vecteur de \(E_{-2}\) est
orthogonal à n'importe quel autre vecteur de \(E_7\). En d'autres termes:
\[
{E_{-2}}^\perp=E_7\,,\qquad {E_7}^\perp=E_{-2}\,.
\]
(Pourtant, \(\boldsymbol{w}_1\) et \(\boldsymbol{w}_2\) ne sont pas orthogonaux entre eux.)
Remarquons aussi que
\[\sum_{k=1}^2\mathrm{mult}_g(\lambda_k)=1+2=3\,,\]
ce qui implique que \(A\) est diagonalisable. En prenant par exemple
\[
D=
\begin{pmatrix}
-2&0&0\\
0&7&0\\
0&0&7
\end{pmatrix}
\,,\quad
P=[\boldsymbol{v}\,\boldsymbol{w}_1\,\boldsymbol{w}_2]
=\begin{pmatrix}
1&1&-1/2\\
1/2&0&1\\
-1&1&0
\end{pmatrix}
\,,
\]
on obtient la diagonalisation \(A=PDP^{-1}\).
Mais rappelons que l'on peut former la matrice de changement de base
en choisissant les vecteurs propres que l'on veut, tant qu'ils forment une base
des espaces propres concernés, et que l'on respecte l'ordre des valeurs
propres dans la matrice diagonale \(D\).
Donc on peut très bien, si on veut, commencer par orthogonaliser la base de
\(E_{7}\) avant de mettre en place \(P\):
\[\begin{aligned}
\boldsymbol{w}_1'&:= \boldsymbol{w}_1\,,\\
\boldsymbol{w}_2'&:= \boldsymbol{w}_2-\mathrm{proj}_{\boldsymbol{w}_1}(\boldsymbol{w}_2)=
\begin{pmatrix}
-1/2\\
2\\
1/2
\end{pmatrix}\,.
\end{aligned}\]
Ainsi, une autre diagonalisation de \(A\)
serait \(A=QDQ^{-1}\), avec la même matrice
\(D\) qu'avant, et
\[
Q=[\boldsymbol{v}\,\boldsymbol{w}_1'\,\boldsymbol{w}_2']
=\begin{pmatrix}
1&1&-1/2\\
1/2&0&2\\
-1&1&1/2
\end{pmatrix}
\,.
\]
Cette fois, les colonnes de \(Q\) sont orthogonales deux à deux.
Or rien ne nous empêche de les normaliser avant de définir \(Q\):
\[
R=
\left[
\frac{\boldsymbol{v}}{\|\boldsymbol{v}\|}\,
\frac{\boldsymbol{w}_1'}{\|\boldsymbol{w}_1'\|}\,
\frac{\boldsymbol{w}_2'}{\|\boldsymbol{w}_2'\|}
\right]\,,
\]
qui donne une troisième diagonalisation de \(A\): \(A=RDR^{-1}\) (avec
\(D\) la même matrice qu'avant).
Mais ici, \(R\) étant orthogonale, son inverse est \(R^{-1}=R^T\), et
donc le changement de base devient
\[
A=RDR^T\,.
\]
On a donc pu diagonaliser \(A\) dans une base orthonormée de \(\mathbb{R}^3\).
Nous verrons, dans la section suivante, que ce que nous avons fait sur ce
dernier exemple peut se faire avec n'importe quelle matrice symétrique.
Quiz 13.3-1 :
Soit \(A\) une matrice symétrique.
Vrai ou faux?
Deux vecteurs propres quelconques de \(A\) sont orthogonaux.