Le produit de deux matrices est motivé par la
composition d'applications linéaires.
Or lorsqu'on veut composer deux applications,
il faut que les ensembles qui apparaissent dans leurs définitions
soient compatibles.
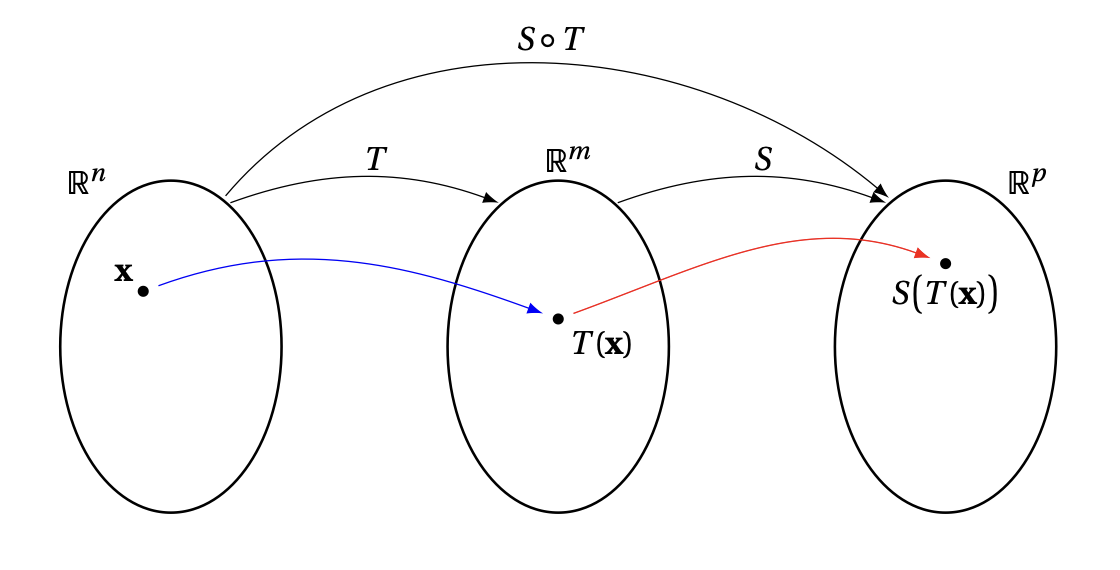
Puisque l'ensemble d'arrivée de \(T\) est l'ensemble de départ de \(S\), on peut les composer:
On rappelle que la composition est définie par \[\begin{aligned} S\circ T:\mathbb{R}^n&\to \mathbb{R}^p \\ \boldsymbol{x}&\mapsto (S\circ T)(\boldsymbol{x}):= S\big(T(\boldsymbol{x})\big)\,. \end{aligned}\]
Comme on a vu dans le deuxième Lemme %(cliquer)
dans la Section (cliquer), la composée \(S\circ T\)
est linéaire; elle peut donc être représentée par une matrice.
Quelle est cette matrice?
Calculons la \(k\)-ème composante de \((S\circ T)(\boldsymbol{x})\):
\[\begin{aligned}
(S\circ T)(\boldsymbol{x})_k
=\Big(S\big(T(\boldsymbol{x})\big)\Big)_k
&=\big(B(A\boldsymbol{x})\big)_k\\
&=\sum_{j=1}^m B_{k,j}(A\boldsymbol{x})_j\\
&={\color{red}\sum_{j=1}^m}B_{k,j}{\color{blue}\sum_{\ell=1}^n}A_{j,\ell}x_\ell\\
&={\color{blue}\sum_{\ell=1}^n}
\Bigl(
\underbrace{{\color{red}\sum_{j=1}^m}B_{k,j}A_{j,\ell}}_{=:C_{k,\ell}}
\Bigr)x_\ell\,.
\end{aligned}\]
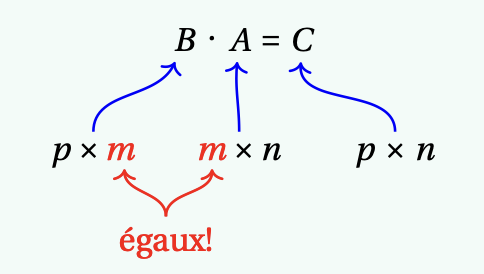
On voit qu'après avoir interverti les sommes sur \(j\) et \(l\), on a pu définir
des coefficients \(C_{k,\ell}\), qui sont les coefficients d'une matrice de taille \(p\times
n\), notée \(C\), qui permet d'écrire
\[
(S\circ T)(\boldsymbol{x})_k
=\sum_{\ell=1}^n C_{k,\ell}x_\ell
=(C\boldsymbol{x})_k\,.
\]
On a donc trouvé la matrice associée à \(S\circ T\), et on sait calculer ses
coefficients en fonction de ceux de \(A\) et \(B\).
L'expression ci-dessus pour le coefficient \(c_{kl}\) montre que ce dernier se calcule en parcourant la \(k\)-ème ligne de \(A\) et la \(l\)-ème colonne de \(B\).
Point clé: la composition d'applications linéaires correspond au produit de matrices
La définition précédente du produit matriciel nous dit que, pour des applications linéaires
\( T : \mathbb{R}^n \rightarrow \mathbb{R}^m \) et \( S : \mathbb{R}^m \rightarrow \mathbb{R}^p \),
\[
[S \circ T] = [S] \, [T]\,.
\]
Exemple: Calculons un produit \(BA=C\), pour des matrices \(4\times 4\): \[ \underbrace{ \begin{pmatrix} 1&2&-2&0\\ {\color{red}3}&{\color{red}2}&{\color{red}-2}&{\color{red}1}\\ -1&1&0&1\\ 5&2&-1&6 \end{pmatrix}}_{B} \underbrace{ \begin{pmatrix} 0&2&{\color{blue}-1}&5\\ 3&1&{\color{blue}5}&-3\\ 2&2&{\color{blue}-1}&1\\ 0&7&{\color{blue}1}&2 \end{pmatrix}}_{A} = \underbrace{ \begin{pmatrix} 2&0&11&-3\\ 2&11&\mathbf{10}&9\\ 3&6&7&-6\\ 4&52&12&30 \end{pmatrix} }_{C}\,. \] Comme exemple, on a indiqué le calcul de \[\begin{aligned} C_{2,3}&=\sum_{j=1}^4 B_{2,j} A_{j,3} \\ &= B_{2,1} A_{1,3} + B_{2,2}A_{2,3} + B_{2,3}A_{3,3} + B_{2,4}A_{4,3}\\ &={\color{red}3}\cdot{\color{blue}(-1)} +{\color{red}2}\cdot{\color{blue}5} +{\color{red}(-2)}\cdot{\color{blue}(-1)} +{\color{red}1}\cdot {\color{blue}1}=\mathbf{10}\,. \end{aligned}\]
Exemple: Le produit d'une matrice de taille \(3\times 2\) par une matrice de taille \(2\times 4\) est bien défini: \[ \underbrace{ \begin{pmatrix} a&b\\ c&d\\ e&f \end{pmatrix} }_{3\times 2} \underbrace{ \begin{pmatrix} 1&2&3&4\\ 5&6&7&8 \end{pmatrix} }_{2\times 4} = \underbrace{ \begin{pmatrix} a+5b&2a+6b&3a+7b&4a+8b\\ c+5d&2c+6d&3c+7d&4c+8d\\ e+5f&2e+6f&3e+7f&4e+8f \end{pmatrix} }_{3\times 4}\,. \] Par contre, dans l'ordre inverse, le produit \[ \underbrace{ \begin{pmatrix} 1&2&3&4\\ 5&6&7&8 \end{pmatrix} }_{2\times 4} \underbrace{ \begin{pmatrix} a&b\\ c&d\\ e&f \end{pmatrix} }_{3\times 2} \qquad \text{n'est pas défini!} \]
Quelques remarques:
Dernière compilation: 2025-09-02 (09:33:29)
Sauf indication contraire, le contenu de ce document est soumis à une licence Creative Commons internationale, Attribution: Pas d'Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 (CC BY-NC-SA 4.0)
