Considérons deux espaces vectoriels, \(V\) et \(V'\), ainsi qu'une application linéaire \(T:V\to V'\).
Supposons maintenant que ces deux espaces vectoriels sont tous deux de dimension finie, chacun muni d'une base:
Nous allons voir maintenant comment l'utilisation de ces bases
va permettre de ramener l'étude de \(T\) à
l'étude d'une application linéaire de \(\mathbb{R}^p\) dans \(\mathbb{R}^m\).
En effet, prenons un vecteur dans l'ensemble de départ, \(v\in V\),
et décomposons-le sur \(\mathcal{B}\):
\[v=a_1v_1+\dots+a_pv_p\,,\]
ce qui permet de décrire \(v\) univoquement
à l'aide du vecteur de \(\mathbb{R}^p\) qui lui est associé:
\[
[v]_\mathcal{B}
=
\begin{pmatrix} a_1\\ \vdots\\ a_p \end{pmatrix} \,.
\]
Ensuite, regardons l'image de \(v\) par \(T\). Puisque \(T\) est linéaire,
\[\begin{aligned}
T(v)
&=T(a_1v_1+\dots+a_pv_p)\\
&=a_1T(v_1)+\dots+a_pT(v_p)\,.
\end{aligned}\]
En utilisant ensuite la linéarité de \([\cdot]_{\mathcal{B}'}\),
\[\begin{aligned}
[T(v)]_{\mathcal{B}'}
&=\bigl[a_1T(v_1)+\dots+a_pT(v_p)\bigr]_{\mathcal{B}'}\\
&=a_1[T(v_1)]_{\mathcal{B}'}+\dots+a_p[T(v_p)]_{\mathcal{B}'}\,.
\end{aligned}\]
Cette dernière ligne est une combinaison linéaire des vecteurs
\([T(v_1)]_{\mathcal{B}'},\cdots,[T(v_p)]_{\mathcal{B}'}\) de \(\mathbb{R}^m\),
on peut donc
l'interpréter comme un produit d'une matrice
par le vecteur \([v]_{\mathcal{B}}\):
\[\begin{aligned}
a_1[T(v_1)]_{\mathcal{B}'}+\dots+a_p[T(v_p)]_{\mathcal{B}'}
&=
\underbrace{\bigl[[T(v_1)]_{\mathcal{B}'} \cdots [T(v_p)]_{\mathcal{B}'}\bigr]}_{m\times n}
\underbrace{\begin{pmatrix} a_1\\ \vdots\\ a_p \end{pmatrix}}_{=[v]_{\mathcal{B}}}\\
&=
\bigl[[T(v_1)]_{\mathcal{B}'} \cdots [T(v_p)]_{\mathcal{B}'}\bigr]
[v]_\mathcal{B}
\end{aligned}\]
Ce que nous avons fait ci-dessus peut se résumer dans le shéma suivant:
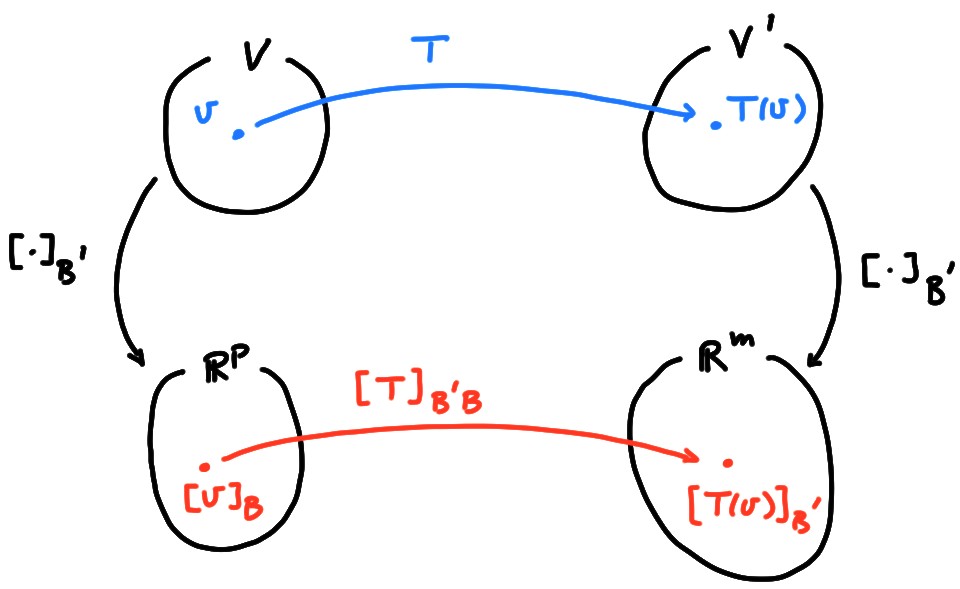
En utilisant les bases \(\mathcal{B}\) et \(\mathcal{B}'\), ainsi que les applications \([\cdot]_{\mathcal{B}}\) et \([\cdot]_{\mathcal{B}'}\) qui leur sont associées, nous avons pu prendre l'application \[{\color{blue}v\mapsto T(v)}\,\] qui est abstraite, et nous l'avons rendue plus concrète, en la représentant à l'aide d'une matrice: on peut maintenant la voir comme une application linéaire de \(\mathbb{R}^p\) dans \(\mathbb{R}^m\), dont la matrice est \([T]_{\mathcal{B}'\mathcal{B}}\): \[ \underbrace{{\color{red}[v]_\mathcal{B}}}_{\in \mathbb{R}^p} \,\, {\color{red}\mapsto} \,\, \underbrace{{\color{red}[T(v)]_{\mathcal{B}'}}}_{\in \mathbb{R}^m} = {\color{red} [T]_{\mathcal{B}'\mathcal{B}} [v]_\mathcal{B} } \] Maintenant, l'étude de \(T\) peut se réduire à celle de la matrice \([T]_{\mathcal{B}'\mathcal{B}}\).
Exemple:
Considérons l'application \(T:\mathbb{P}_3\to \mathbb{P}_2\) définie ainsi:
pour \(p\in \mathbb{P}_3\),
\[
T(p)=p'\,,
\]
qui signifie que \(T(p)(t):= p'(t)\) (dérivée de \(p\) par rapport à
\(t\)).
Cette application est clairement linéaire puisque
\[
T(\alpha p+\beta q)=(\alpha p+\beta q)'=\alpha p'+\beta q'=
\alpha T(p)+\beta T(q)\,.
\]
Calculons maintenant la matrice associée à cette application, relativement
Exemple: Considérons l'application \[\begin{aligned} T:\mathbb{P}_2&\to\mathbb{R}^2\\ p&\mapsto T(p):= \begin{pmatrix} p(0)\\p'(1) \\ \end{pmatrix}\,. \end{aligned}\] (\(p'(t)\) est la dérivée de \(p(t)\) par rapport à \(t\).) Remarquons que \(T\) est linéaire, puisque pour tous \(p,q\in \mathbb{P}_2\) et tout scalaires \(\alpha,\beta\), \[\begin{aligned} T(\alpha p+\beta q) &= \begin{pmatrix} \alpha p(0)+\beta q(0)\\ \alpha p'(1)+\beta q'(1) \end{pmatrix}\\ &= \alpha \begin{pmatrix} p(0)\\ p'(1) \end{pmatrix} + \beta \begin{pmatrix} q(0)\\ q'(1) \end{pmatrix} =\alpha T(p)+\beta T(q)\,. \end{aligned}\] Puisqu'on connaît la base canonique \(\mathcal{B}_{\mathrm{can}}=(e_0,e_1,e_2)\) dans \(\mathbb{P}_2\) et la base canonique \(\mathcal{B}_{\mathrm{can}}'=(\boldsymbol{e}_1,\boldsymbol{e}_2)\) dans \(\mathbb{R}^2\) (on écrit \(\mathcal{B}_{\mathrm{can}}'\) juste pour la distinguer de l'autre, mais c'est bien la base canonique de \(\mathbb{R}^2\)), on peut calculer la matrice \(2\times 3\) qui représente \(T\) relativement à ces bases: \[ [T]_{\mathcal{B}_{\mathrm{can}}'\mathcal{B}_{\mathrm{can}}} = \bigl[[T(e_0)]_{\mathcal{B}_{\mathrm{can}}'}\,[T(e_1)]_{\mathcal{B}_{\mathrm{can}}'}\,[T(e_2)]_{\mathcal{B}_{\mathrm{can}}'}\bigr]\,. \] Comme \(e_0(t)=1\), \(e_1(t)=t\), \(e_2(t)=t^2\), on a \[\begin{aligned} T(e_0)&= \begin{pmatrix} e_0(0)\\ e_0'(1) \end{pmatrix} = \begin{pmatrix} 1\\ 0 \end{pmatrix}\\ T(e_1)&= \begin{pmatrix} e_1(0)\\ e_1'(1) \end{pmatrix} = \begin{pmatrix} 0\\ 1\end{pmatrix}\\ T(e_2)&= \begin{pmatrix} e_2(0)\\ e_2'(1) \end{pmatrix} = \begin{pmatrix} 0\\ 2\end{pmatrix}\,, \end{aligned}\] et donc \[ [T]_{\mathcal{B}_{\mathrm{can}}'\mathcal{B}_{\mathrm{can}}} = \begin{pmatrix} 1&0&0\\ 0&1&2 \end{pmatrix}\,. \] Par exemple, prenons le polynôme \(p(t)=9-2t+7t^2\), et calculons son image. Alors \[\begin{aligned} [T(p)]_{\mathcal{B}_{\mathrm{can}}'} &= [T]_{\mathcal{B}_{\mathrm{can}}'\mathcal{B}_{\mathrm{can}}}[p]_{\mathcal{B}_{\mathrm{can}}}\\ &= \begin{pmatrix} 1&0&0\\ 0&1&2 \end{pmatrix} \begin{pmatrix} 9\\ -2\\ 7 \end{pmatrix} = \begin{pmatrix} 9\\12 \end{pmatrix}\,, \end{aligned}\] qui est bien \( \begin{pmatrix} p(0)\\p'(1) \end{pmatrix} \).
Nous reviendrons plus en profondeur sur la représentation d'une application linéaire à l'aide d'une matrice, en particulier dans le cas \(T:\mathbb{R}^n\to\mathbb{R}^m\).
Dernière compilation: 2025-03-16 (08:47:53)
Sauf indication contraire, le contenu de ce document est soumis à une licence Creative Commons internationale, Attribution: Pas d'Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 (CC BY-NC-SA 4.0)
